





























58
Note:
(1) The excitation voltage of the power-off brake is 24V.
(2) If the holding brake current is more than 50mA, please transfer it through the relay to prevent
terminal burnt out due to excessive current.
(2) Software parameter settings
For the servo motor with holding brake, it is necessary to configure one SO terminal of servo driver as
holding brake output /BK function, and determine the effective logic of SO terminal, that is, parameter
P5-44 needs to be set.
Parameter
setting
Servo status
Signal/BK terminal
output logic
Servo motor status
P5-44=n.000□
Servo bb
Invalid
Holding brake power off, motor in position
locked state
Servo run
Valid
The holding brake power is connected and
the motor is in rotatable state
P5-44=n.001□
Servo run
Invalid
Holding brake power off, motor in position
locked state
Servo bb
Valid
The holding brake power is connected and
the motor is in rotatable state
Note:
(1) When SO terminal is used to control holding brake, when servo enable is on, holding brake power
is on and motor is in rotatable state;
(2) If the motor fails to rotate during the debugging of the new machine, please confirm whether the
holding brake is open.
(3) Time sequence of holding brake control
①
Holding brake sequence in normal state
Due to the action delay time of the brake, the machine moves slightly under the action of gravity.
Use P5-07 parameter to adjust the time, so that the holding brake can be opened or closed in advance.
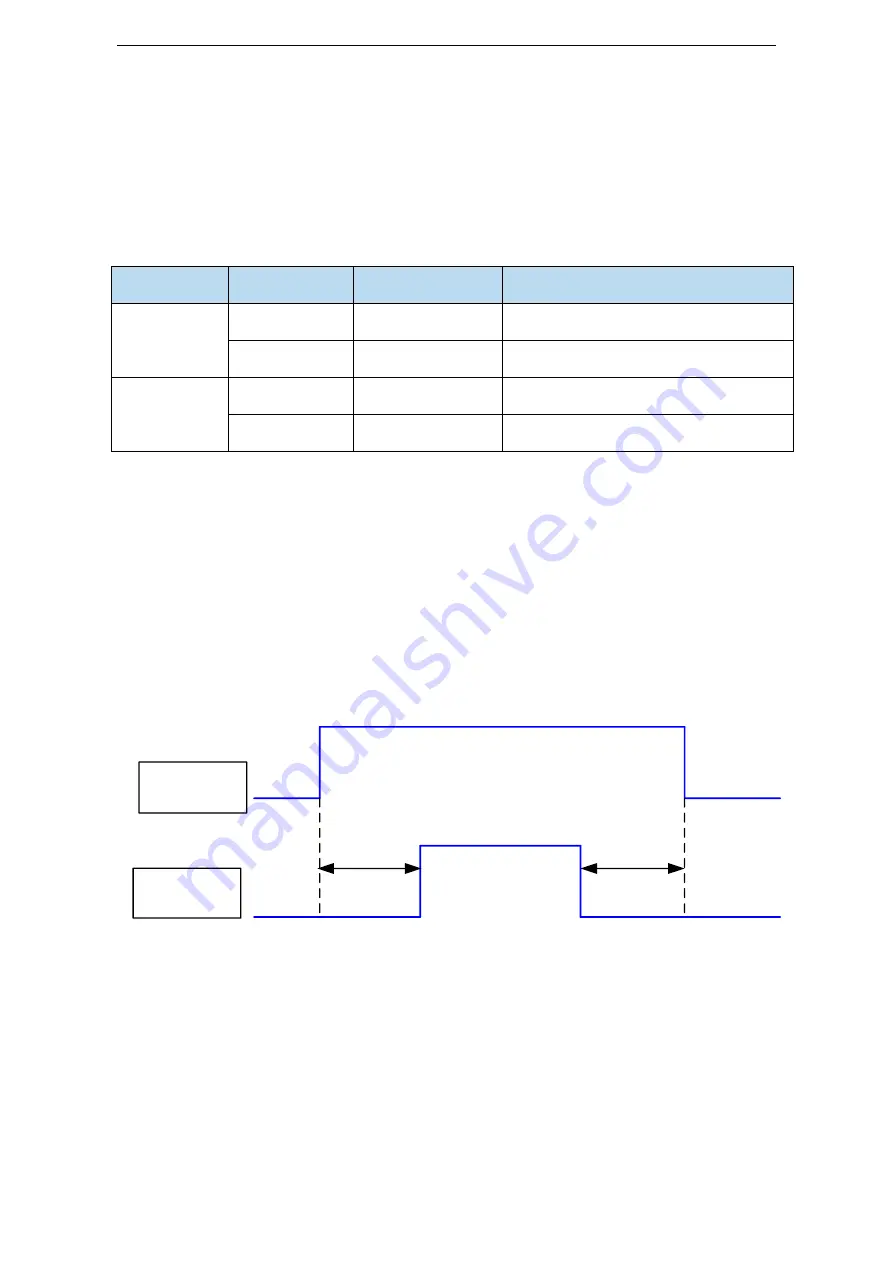
When setting the servo motor with brake, the output signal "/ BK" of control brake and the time of
servo SON signal on/off action are shown in the figure below. That is to say, before the /BK signal
outputting and brake is opened, the servo motor has entered the power on enabling state; after the / BK
not outputting and brake is locked, the servo motor will turn off the power on state.
Servo off advance
P5-07 lock
/S-ON input
/BK output
Servo on lag
P5-07 holding brake open
Note: the setting made here is the time when TGON of rotation detection is invalid when the
motor is stopped.
②
Abnormal state holding brake timing
When the alarm/power supply interruption occurs, the motor quickly becomes non energized.
During the time from gravity or inertia to the brake action, the machine will move. To avoid this,
The conditions for the /BK signal to turn from on to off in the motor rotation are as follows (any
of the two conditions will take effect):
1) After the servo is off, the motor speed is below the set value of P5-08;
2) After the servo is off, when the set time of P5-09 is exceeded.
Содержание DS5F Series
Страница 1: ...DS5F series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 02 20200217 2 3 ...
Страница 2: ......
Страница 41: ...39 3 2 5 Encoder feedback output signal Servo driver differential to collector upper device ...
Страница 124: ...122 2 select jog setting or manual setting to configure the inertia estimation trip 3 Set the auto tuning interface ...
Страница 202: ...200 Appendix 9 Torque speed characteristic curve ...
Страница 203: ...201 ...
Страница 204: ...202 ...







































































