





























114
If the set value is exceeded, reset is required by turning off enable when it output E-236.
When P9-02 is set to 0, it will not alarm, but when the motor encoder signal and grating scale
signal count in the opposite direction, it will alarm E-237, and restore by reset and adjusting P9-00.1.
②
In order to prevent the motor from running away and damaging due to the damage of external
grating ruler or loose wiring, please set P9-02 to the appropriate value.
③
P9-02 is set according to the resolution of grating ruler.
Parameter
Meaning
Default
setting
Unit
Range
Modify
Effective
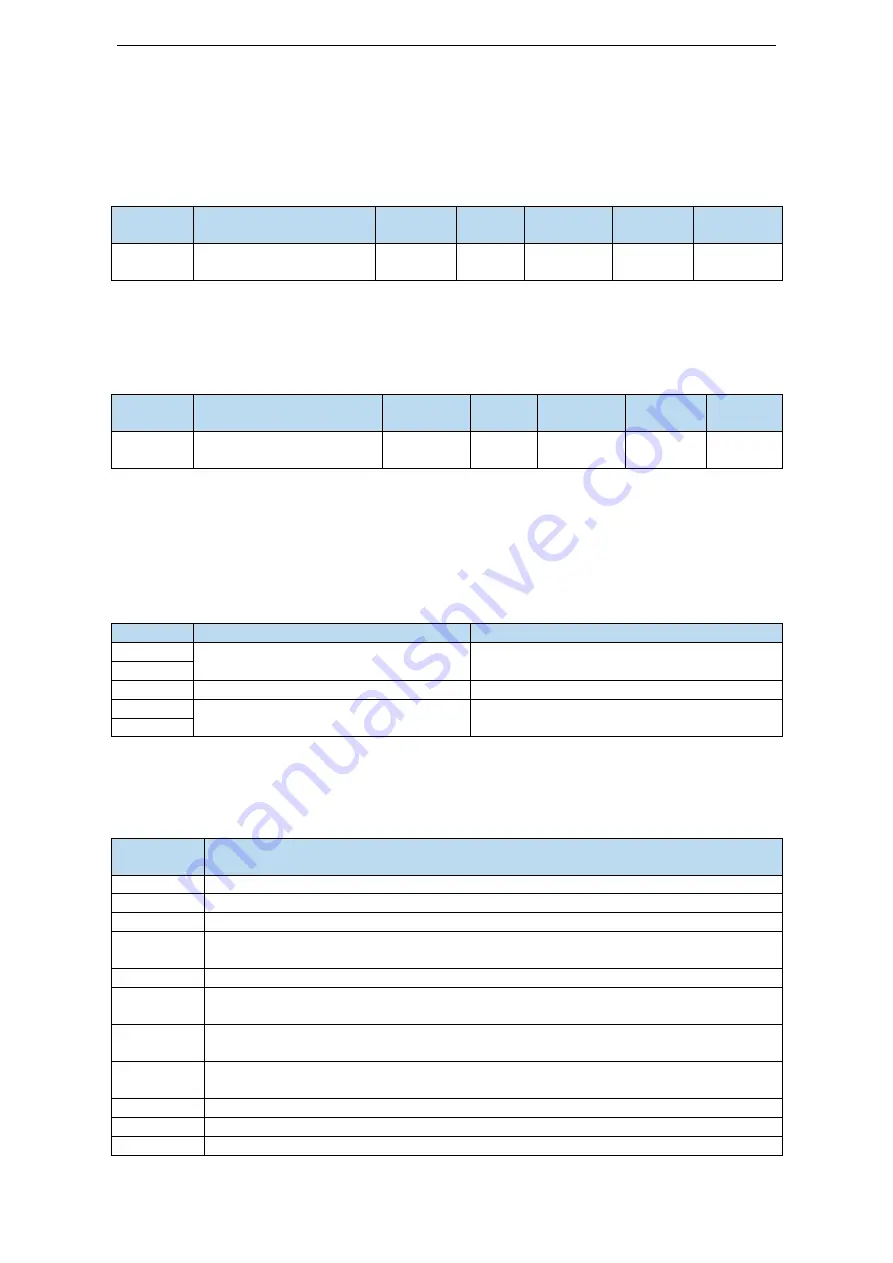
P9-03
Motor load position
deviation clearing setting
0
turn
0
~
65535
Servo bb
At once
①
When P9-03 motor rotates N cycles in one direction, the recorded value of the difference
between the motor encoder feedback (position) and the full closed-loop grating scale feedback (load
position) will be cleared and counted again from zero.
②
If it is set to 0, the motor load position deviation will not be cleared. If it is set to a non-zero
value, the motor load position deviation will be cleared after the motor has accumulated N revolutions.
Parameter
Meaning
Default
setting
Unit
Range
Modify Effective
P9-04
Motor load speed deviation
too large alarm value
100
RPM
0
~
65535
Servo
OFF
At once
No alarm when this parameter is set to 0.
P9-04 is the deviation between motor encoder speed feedback and full closed-loop grating scale
speed feedback. If the actual deviation exceeds the set value, the alarm E-238 will happen, only valid
when the full closed-loop speed feedback P9-01.0 is open.
5.9.3.6 Monitoring parameters in full closed loop mode
In the full closed-loop mode, the motor encoder data in the original control loop is replaced by the
grating scale feedback position data (except for the mechanical angle feedback in the current loop).
Parameter
Meaning
Data
U4-11
Grating ruler raw data
U4-12*10000+ U4-11
U4-12
U4-13
Original z-phase number of grating ruler
-
U4-14
Grating ruler motion feedback data
U4-15*10000+ U4-14
U4-15
5.9.3.7 Sampling channel of full closed loop control
When the grating speed feedback is enabled, the feedback speed information of the motor encoder
will also be replaced by the grating speed data. That is to say, the same channel sampling results in
grating scale feedback information.
Sampling
channel
Sampling function
1950
Original position information of grating ruler
1951
The difference position feedback of grating scale calculated by twice data
1952
The difference position data of grating ruler feedback by ENC module
0953
Differential position feedback of grating scale obtained from data calculation under the
resolution of motor encoder
0954
When the full closed-loop speed feedback is on, the grating scale speed feedback [Norm]
0955
The error between the position feedback of the motor encoder and the difference value
of the position feedback of the grating ruler under the resolution of the grating ruler
0956
Error accumulation value between position feedback of motor encoder and difference
value of position feedback of grating ruler under the resolution of grating ruler
1957
Error accumulation value between motor encoder feedback and grating ruler position
feedback difference value under user command resolution
4958
Motor encoder feedback for clearing error per n turns
4959
The original feedback of motor encoder in grating resolution
0960
Speed feedback of motor encoder under full closed loop [Norm] (corresponding to 0954)
Содержание DS5F Series
Страница 1: ...DS5F series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 02 20200217 2 3 ...
Страница 2: ......
Страница 41: ...39 3 2 5 Encoder feedback output signal Servo driver differential to collector upper device ...
Страница 124: ...122 2 select jog setting or manual setting to configure the inertia estimation trip 3 Set the auto tuning interface ...
Страница 202: ...200 Appendix 9 Torque speed characteristic curve ...
Страница 203: ...201 ...
Страница 204: ...202 ...







































































