


























SD500 Spindle Servo Drive Manual
93
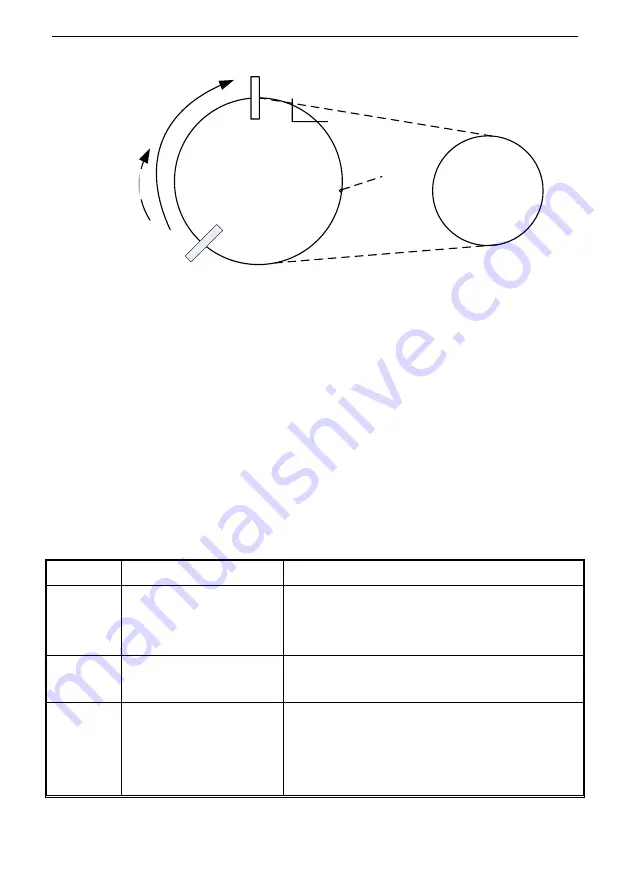
Orientation running
direction
F24.04
F
or
w
ard
A
Orientated position
B
Current position
2
:
reverse
Motor
0: shortest stroke
1: forward
F24.01
0:Z-pulse
1:Proximity
switch
Figure 5-4
Orientation FAQ
Problem 1:
The motor is moving too slowly when it is stationary to enable orientation.
Treatment:
Reduce F24.06 acceleration/deceleration time and increase F24.23/24 value.
Problem 2:
The quasi-stop is not stopped accurately
Monitoring:
C4.15 position error
Judgment:
C4.15=0, then determine whether the system mode is set correctly; rotate the axis and observe C4.00 to determine whether the
quasi-stop point is the desired point.
5.5 Common Faults and Problems Explanation
5.5.1 Encoder-related Faults
Self-learning-
related fault E. PGxx‘s
detailed diagnosis information is shown in the table below, "xx" is the self-learning fault sub-code, or
C01.01=44xx.
Sub-code
Troubleshooting information
Solutions
1
Encoder parameter error
Motor rotation frequency is not consistent with the encoder feedback frequency.
The difference between the numerator/denominator of the encoder ratio
(F02.35/F02.36) is too large
2
Motor encoder Z-pulse fault
1.Wrong setting of encoder wire number.
2.The encoder has lost pulse or the external encoder pulley is skidding.
5
Motor encoder disconnection fault
Hardware does not detect a clear level signal
1. Encoder fault.
2. Cables are not plugged (F2.38=0 for shielding, not recommended to shield
for common use)







































































