





























176
Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
Chapter 9 Motion Control
Axis Error Scenarios
In most cases, when a movement function block instruction issued to an axis results in a
function block error, the axis is also usually flagged as being in Error state. The corresponding
ErrorID element is set on the axis_ref data for the axis. However, there are exception scenarios
where an axis error is not flagged. The exception can be, but not limited to, the following
scenarios:
• A movement function block instructs an axis, but the axis is in a state where the
function block could not be executed properly. For example, the axis has no power, or is
in Homing sequence, or in Error Stop state.
• A movement function block instructs an axis, but the axis is still controlled by another
movement function block. The axis cannot allow the motion to be controlled by the new
function block without going to a full stop. For example, the new function block
commands the axis to change motion direction.
• When one movement function block tries to control an axis, but the axis is still
controlled by another movement function block, and the newly defined motion profile
cannot be realized by the controller. For example, User Application issues an S-Curve
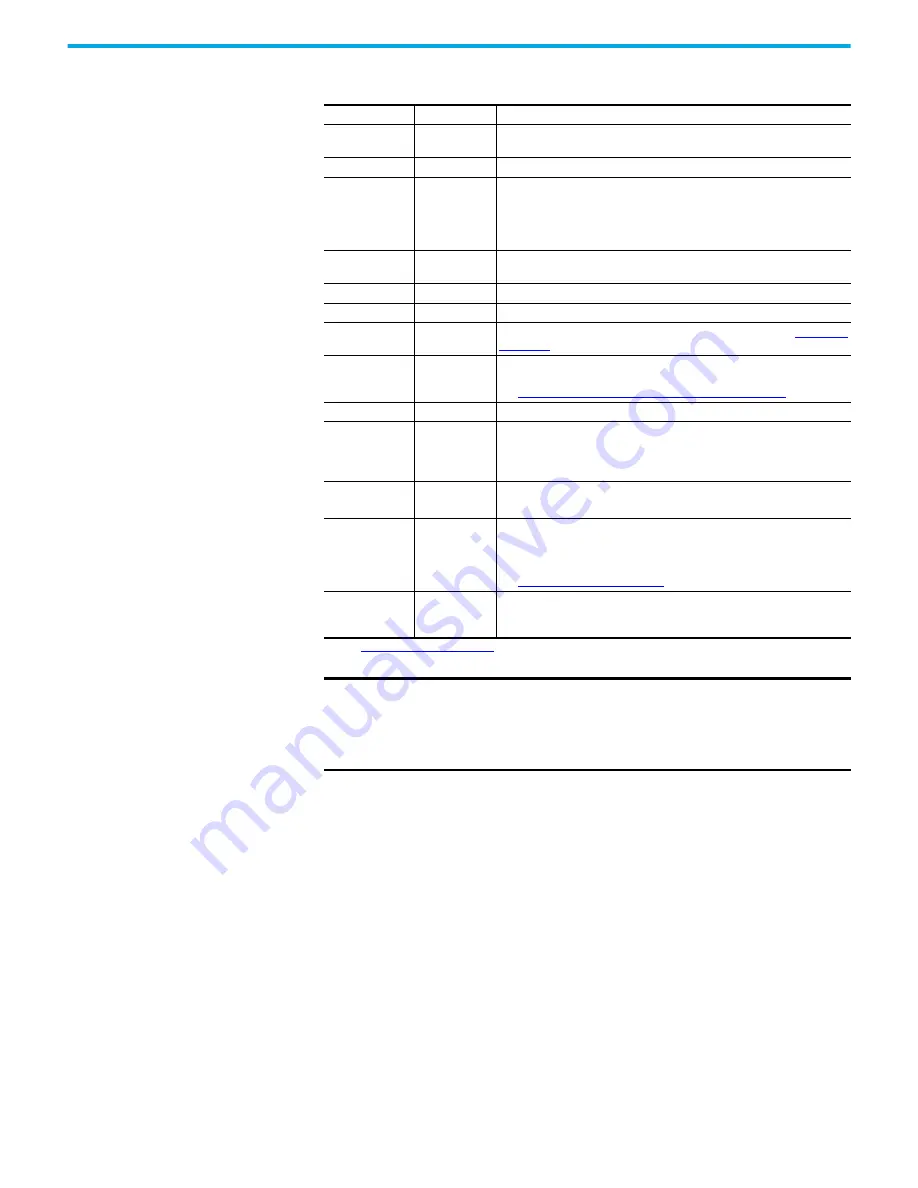
Data Elements for Axis_Ref
Element Name
Data Type
Description
Axis_ID
UINT8
The logic axis ID automatically assigned by the Connected Components
Workbench software. This parameter cannot be edited or viewed by user.
ErrorFlag
UINT8
Indicates whether an error is present in the axis.
AxisHomed
UINT8
Indicates whether homing operation is successfully executed for the axis or
not.
When the user tries to redo homing for an axis with AxisHomed already set
(homing performed successfully), and the result is not successful, the
AxisHomed status will be cleared.
ConsVelFlag
UINT8
Indicates whether the axis is in constant velocity movement or not.
Stationary axis is not considered to be in constant velocity.
AccFlag
UINT8
Indicates whether the axis is in an accelerating movement or not.
DecFlag
UINT8
Indicates whether the axis is in a decelerating movement or not.
AxisState
UINT8
Indicates the current state of the axis. For more information, see
.
ErrorID
UINT16
Indicates the cause for axis error when error is indicated by ErrorFlag. This
error usually results from motion function block execution failure.
Motion Function Block and Axis Status Error ID on page 178
ExtraData
UINT16
Reserved.
TargetPos
REAL
(float)
(1)
(1) See
Real Data Resolution on page 187
for more information on REAL data conversion and rounding.
Indicates the final target position of the axis for MoveAbsolute and
MoveRelative function blocks.
For MoveVelocity, Stop, and Halt function blocks, TargetPos is 0 except when
the TargetPos set by previous position function blocks is not cleared.
CommandPos
REAL
(float)
(1)
On a moving axis, this is the current position the controller commands the
axis to go to.
TargetVel
REAL
(float)
(1)
The maximum target velocity issued to the axis by a move function block.
The value of TargetVel is same as the velocity setting in current function
block, or smaller, depending on other parameters in the same function
block. This element is a signed value indicating direction information.
PTO Pulse Accuracy on page 189
for more information.
CommandVel
REAL
(float)
(1)
During motion, this element refers to the velocity the controller commands
the axis to use. This element is a signed value indicating direction
information.
IMPORTANT
• Once an axis is flagged with error, and the error ID is not zero, the user
needs to reset the axis (using MC_Reset) before issuing any other
movement function block.
• The update for axis status is performed at the end of one program scan
cycle, and the update is aligned with the update of Motion Axis status.
Содержание 2080-L50E-24AWB
Страница 14: ...14 Rockwell Automation Publication 2080 UM002N EN E November 2022 Notes ...
Страница 54: ...54 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 4 Wire Your Controller Notes ...
Страница 128: ...128 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 7 Program Execution in Micro800 Notes ...
Страница 156: ...156 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 8 EtherNet IP Network Notes ...
Страница 198: ...198 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 9 Motion Control Notes ...
Страница 232: ...232 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 11 Controller Security Notes ...
Страница 260: ...260 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 12 Using microSD Cards Notes ...
Страница 266: ...266 Rockwell Automation Publication 2080 UM002N EN E November 2022 Appendix A Modbus Mapping for Micro800 Notes ...
Страница 275: ...Rockwell Automation Publication 2080 UM002N EN E November 2022 275 Appendix B Quickstarts 10 Click Finish to complete ...
Страница 332: ...332 Rockwell Automation Publication 2080 UM002N EN E November 2022 Appendix E PID Function Blocks Notes ...
Страница 352: ...352 Rockwell Automation Publication 2080 UM002N EN E November 2022 Appendix G Connect to Networks using DF1 Notes ...
Страница 388: ...388 Rockwell Automation Publication 2080 UM002N EN E November 2022 Index Notes ...