





























Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
175
Chapter 9 Motion Control
Decelerating Soft Stop
Decelerating soft stop could be delayed as much as Motion Engine Execution Time interval.
This type of stop is applied in the following scenarios:
• One Hard Limit is enabled for an axis, but Hard Stop on Hard Limit switch is configured
as Off. If the emergency stop is configured as decelerating stop, during motion, when
the Hard Limit switch is detected;
• One Soft Limit is enabled for an axis and the axis has been homed. If the emergency
stop is configured as decelerating stop, during motion, when the soft limit reach is
detected by firmware;
• The Emergency Stop is configured as Decelerating Stop. During motion, the MC_Stop
function block is issued with deceleration parameter set to 0.
• During motion, MC_Stop function block is issued with Deceleration parameter not set
to 0.
Motion Direction
For distance (position) motion, with the target position defined (absolute or relative), the
direction input is ignored.
For velocity motion, direction input value can be positive (1), current (0) or negative (-1). For any
other value, only the sign (whether positive or negative) is considered and defines whether the
direction is positive or negative. This means that if the product of velocity and direction is -3,
then direction type is negative.
Axis Elements and Data Types
Axis_Ref Data Type
Axis_Ref is a data structure that contains information on a motion axis. It is used as an input
and output variable in all motion function blocks. One axis_ref instance is created
automatically in the Connected Components Workbench software when the user adds one
motion axis to the configuration.
The user can monitor this variable in controller debug mode through the software when the
motion engine is active, or in the user application as part of user logic. It can also be
monitored remotely through various communication channels.
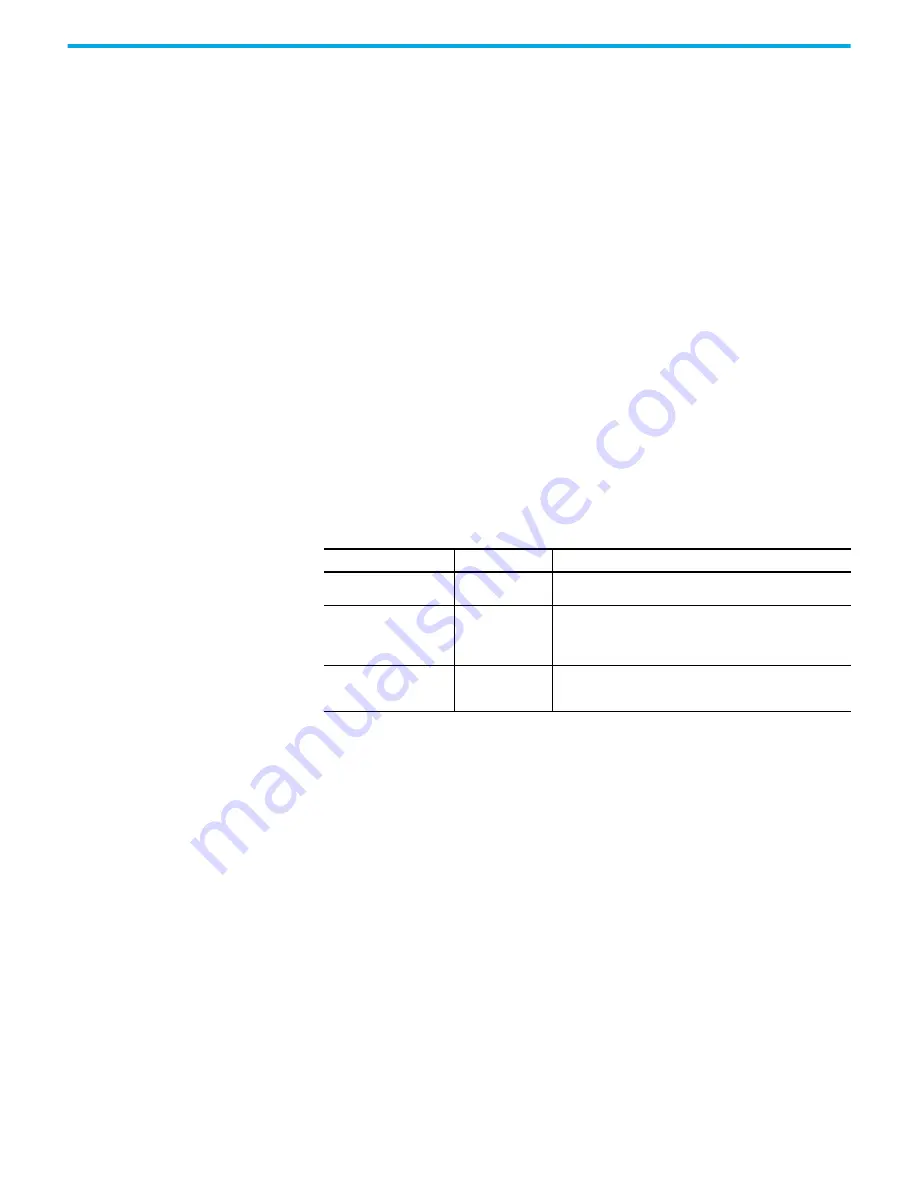
MC_MoveVelocity Supported Direction Types
Direction Type
Value Used
(1)
(1) Data type: short integer.
Direction Description
Positive direction
1
Specific for motion/rotation direction.
Also called clockwise direction for rotation motion.
Current direction
0
Current direction instructs the axis to continue its motion with
new input parameters, without direction change.
The direction type is valid only when the axis is moving and the
MC_MoveVelocity is called.
Negative direction
-1
Specific for motion/rotation direction.
Also referred to as counter-clockwise direction for rotation
motion.
Содержание 2080-L50E-24AWB
Страница 14: ...14 Rockwell Automation Publication 2080 UM002N EN E November 2022 Notes ...
Страница 54: ...54 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 4 Wire Your Controller Notes ...
Страница 128: ...128 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 7 Program Execution in Micro800 Notes ...
Страница 156: ...156 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 8 EtherNet IP Network Notes ...
Страница 198: ...198 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 9 Motion Control Notes ...
Страница 232: ...232 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 11 Controller Security Notes ...
Страница 260: ...260 Rockwell Automation Publication 2080 UM002N EN E November 2022 Chapter 12 Using microSD Cards Notes ...
Страница 266: ...266 Rockwell Automation Publication 2080 UM002N EN E November 2022 Appendix A Modbus Mapping for Micro800 Notes ...
Страница 275: ...Rockwell Automation Publication 2080 UM002N EN E November 2022 275 Appendix B Quickstarts 10 Click Finish to complete ...
Страница 332: ...332 Rockwell Automation Publication 2080 UM002N EN E November 2022 Appendix E PID Function Blocks Notes ...
Страница 352: ...352 Rockwell Automation Publication 2080 UM002N EN E November 2022 Appendix G Connect to Networks using DF1 Notes ...
Страница 388: ...388 Rockwell Automation Publication 2080 UM002N EN E November 2022 Index Notes ...