





























Vacuum level (%)
Pressure difference (kPa)
60
60.8
70
70.9
80
81.1
90
91.2
100
101.3
Table 6-3: Conversion of absolute pressure to vacuum level
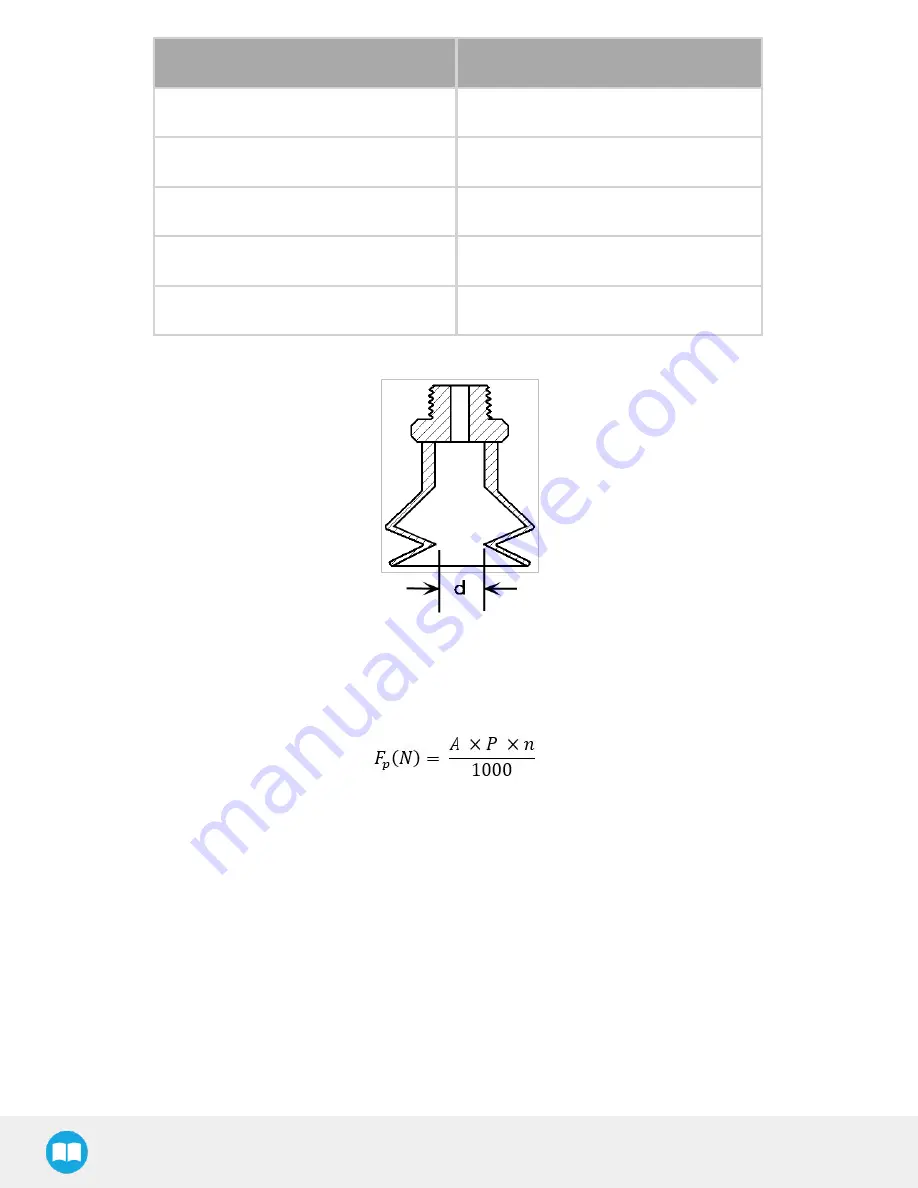
Fig. 6-9: Suction cup with inside diameter
Depending on the selected suction cup, the maximum grip strength can be determined with the following equation:
Where:
l
A= Suction cups internal surface (mm
2
)
l
P= Vacuum Level (kPa)
l
n= Quantity of suction cups to lift-off
For more details, please refer to the specifications provided by the suction cup manufacturer.
The payload is the mass to be lifted according to an acceleration and an applied safety factor. There are three main types of load
application that are represented in the following cases. Note that the arrows represent the robot movement.
82
Содержание AirPick
Страница 25: ...Fig 3 7 Mounting air nodes suction cups air bolts air nuts on the bracket 25...
Страница 27: ...Fig 3 9 Robotiq Vacuum Gripper with pigtail cable and device cable wiring scheme 27...
Страница 35: ...Fig 4 1 Vacuum Gripper control logic overview 35...
Страница 57: ...7 Click on the New Project icon in the upper left corner of the screen 57...
Страница 58: ...AirPick Instruction Manual 8 Enter a name for your program and click on the OK button 9 58...
Страница 76: ...Fig 6 5 Minimum and maximum arrangement possibilities of the air nodes position 76...
Страница 77: ...AirPick Instruction Manual 6 1 3 Air nodes Fig 6 6 Air nodes dimensions 77...
Страница 103: ...AirPick Instruction Manual 12 Appendix Fig 12 1 Pneumatic schema of the AirPick Vacuum Gripper...







































































