





























4 - 16 4 - 16
MELSEC-Q
4 DATA USED FOR POSITIONING CONTROL
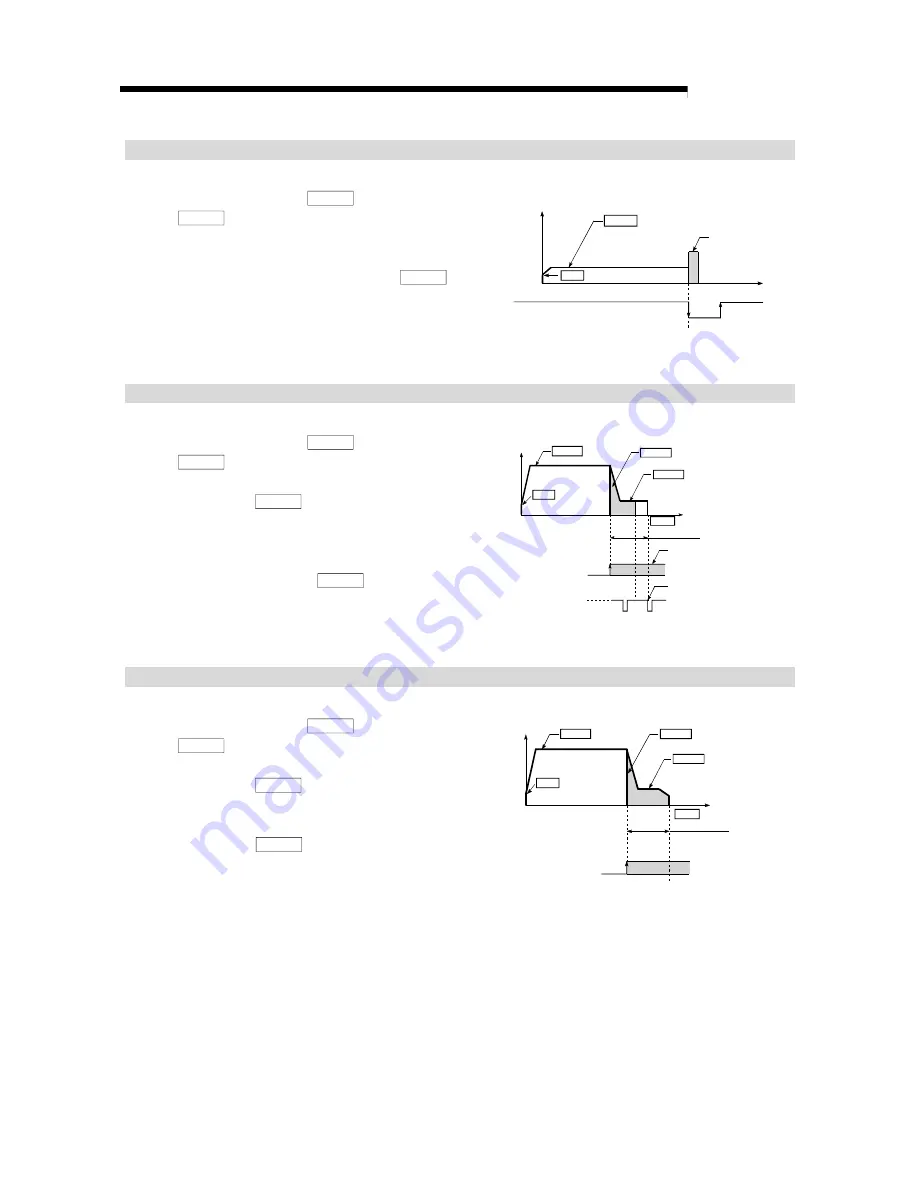
3 : Stopper 3
(1) Start machine OPR control.
(Start movement at the " OPR. 5 Creep speed" in the
" OPR. 2 OPR direction". (At this time, a torque limit is
needed for the motor. If there is no torque limit, the motor
may fail at (2).)
(2) The axis contacts against the stopper at " OPR. 5 Creep
speed", and then stops.
(3) When the zero signal (signal output on detection of contact
with the stopper) is detected after a stop, the pulse output
from the QD70 stops and OPR control is completed.
t
V
(1)
(2)
(3)
OPR. 5 Creep speed
Pr. 6 Bias speed at start
Stopped by stopper
Zero signal
4 : Count 1
(1) Start machine OPR control.
(Start movement at the " OPR. 4 OPR speed" in the
" OPR. 2 OPR direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to " OPR. 5 Creep speed", and move with the
creep speed.
(4) When the first zero signal (one pulse of which is output
when the motor turns one revolution) is detected after the
movement amount set in " OPR. 8 Setting for the
movement amount after near-point dog ON" has been
travelled after near-point dog ON, the pulse output from the
QD70 stops and OPR control is completed.
t
V
ON
(4)
(3)
(2)
(1)
OPR. 4 OPR speed
Pr. 6 Bias speed
at start
OPR. 8 Setting for the movement
amount after near-point dog ON
OPR. 5 Creep speed
Md. 2 Movement amount
after near-point dog ON
Near-point dog OFF
Zero signal
Near-point dog should be
turned OFF with enough distance
provided from OP position.
First zero after movement amount
has been traveled after near-point
dog OFF
5 : Count 2
(1) Start machine OPR control.
(Start movement at the " OPR. 4 OPR speed" in the
" OPR. 2 OPR direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to " OPR. 5 Creep speed", and move with the
creep speed.
(4) After the near-point dog turns ON and the movement
amount set in " OPR. 8 Setting for the movement amount
after near-point dog ON" has passed, the pulse output from
the QD70 stops with the first zero signal, and the OPR
control is completed.
t
V
ON
(1)
(2)
(3)
(4)
OPR. 4 OPR speed
Pr. 6 Bias speed
at start
OPR. 8 Setting for the movement
amount after near-point dog ON
OPR. 5 Creep speed
Md. 2 Movement amount
after near-point dog ON
Near-point dog OFF
Содержание GX Configurator-PT
Страница 13: ...MEMO SECTION 1...
Страница 127: ...7 20 7 20 MELSEC Q 7 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL MEMO...
Страница 129: ...MEMO SECTION 2...
Страница 221: ...Index 5 Index 5 MEMO...







































































