





























-44-
5.1 What is Force Sense Control?
The force sense control function is used to control robot flexibility and push force. Depending on the
application, this function switches between "force control" and "stiffness control".
1) Force control
This control mode controls the robot while pushing with a specified force. The robot moves
automatically to the position at which the specified reactive force applies.
The robot can be moved while pushing the workpiece with constant force and maintaining the contact
status.
Force control has the following 2 modes.
<Speed priority mode>
If no contact has been made with the target object, the robot switches to speed control mode and
moves at the specified speed toward the object.
<Force priority mode>
If contact has been made with the target object, the robot switches to force control mode and the
robot is controlled in order that the specified reactive force applies.
2) Stiffness control/limited stiffness control
This control mode is used to control the robot flexibly like a spring. By applying external force, the
robot moves automatically in the direction that allows it to release the external force.
This type of control can be used to suppress the force applied on the workpiece when performing
insertion work.
Furthermore, the robot position is offset while following the assembly part shape, allowing teaching
position displacements to be absorbed.
In the stiffness control, the reactive force will increase in proportion to displacement. If the reaction
force is too large, please set the limit value for the reactive force using the limited stiffness control.
3) Position control
This control mode is used to control the robot position. Position control is applied to axes for which
neither force control nor stiffness control are specified.
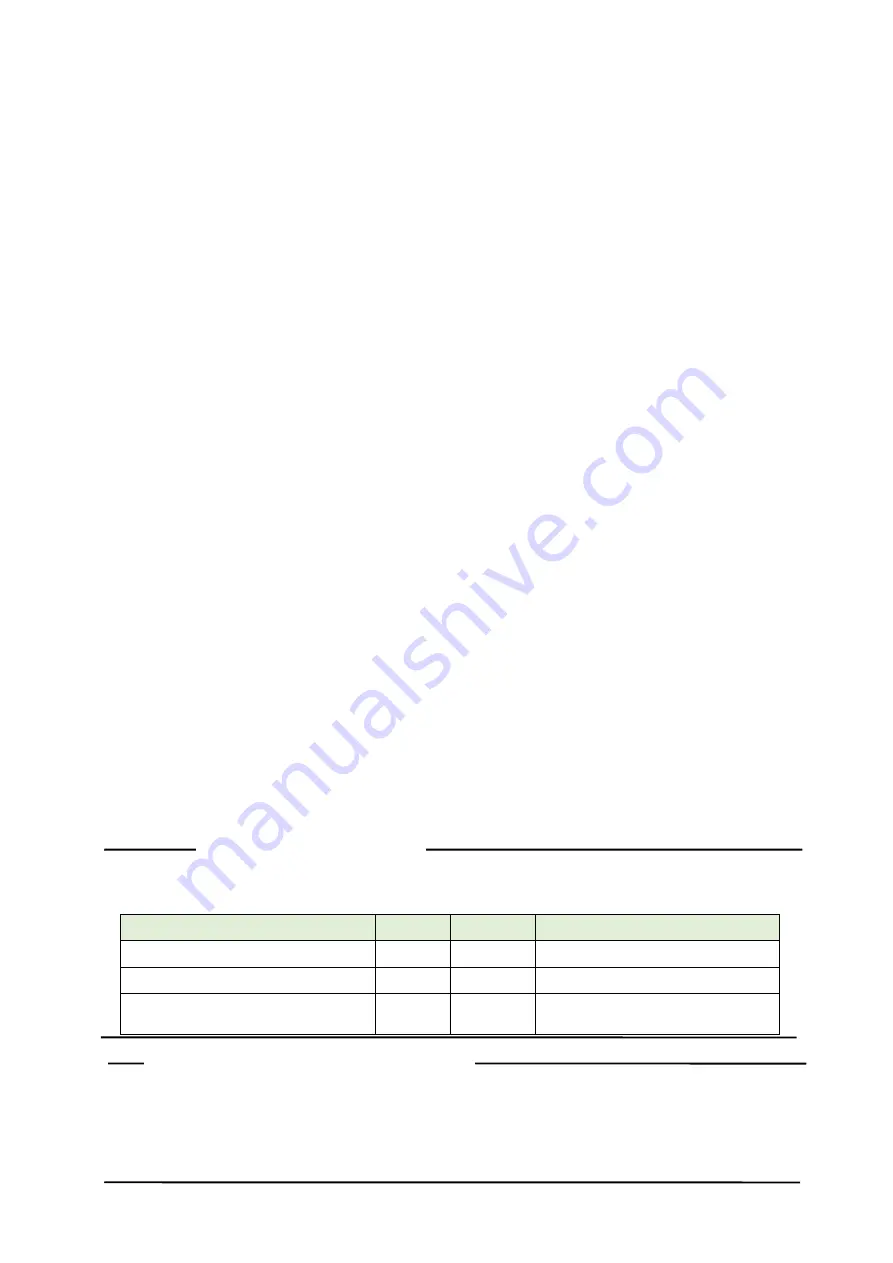
The following table shows the limit for the position offset amount and offset speed by the
force sense control.
The positional offset limit can be changed in parameter FSCORMX.
Offset and offset speed limits
X, Y, Z
A, B, C
Remarks
Positional offset limit
10 [mm]
10 [deg]
Can be changed in FSCORMX.
Speed offset limit (Automatic)
80 [mm/s] 80 [deg/s]
Speed offset limit (Manual)
Approx.8
[mm/s]
Approx.8
[deg/s]
Pick Up
!
Singular point adjacent operation cannot be performed while force sense control is enabled, regardless
of interpolation or JOG operation.
(The error L3986 occurs.)
If necessary to move the robot adjacent to a singular point, or if wishing to pass through the singular
point using the singular point pass function, disable the force sense function.
Singular point adjacent operation restrictions
Содержание MELFA BFP-A3614
Страница 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Страница 2: ......
Страница 8: ... Revision History Print Date Instruction Manual No Revision content 2018 07 31 BFP A3614 First print ...
Страница 33: ... 22 b CR800 R controller CN1 connector CR800 R controller front To OPT1 connector CPU module SSCNET III cable ...
Страница 34: ... 23 2 F series a CR750 D controller ...
Страница 35: ... 24 b CR751 D controller ...
Страница 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Страница 75: ... 64 MEMO Please use this page for your memo ...
Страница 95: ... 84 MEMO Please use this page for your memo ...
Страница 103: ... 92 MEMO Please use this page for your memo ...
Страница 111: ... 100 MEMO Please use this page for your memo ...
Страница 119: ... 108 MEMO Please use this page for your memo ...
Страница 123: ... 112 MEMO Please use this page for your memo ...
Страница 129: ... 118 MEMO Please use this page for your memo ...
Страница 133: ... 122 MEMO Please use this page for your memo ...
Страница 137: ... 126 MEMO Please use this page for your memo ...
Страница 143: ... 132 MEMO Please use this page for your memo ...
Страница 149: ... 138 MEMO Please use this page for your memo ...
Страница 153: ... 142 MEMO Please use this page for your memo ...
Страница 159: ... 148 MEMO Please use this page for your memo ...
Страница 171: ... 160 MEMO Please use this page for your memo ...
Страница 183: ... 172 MEMO Please use this page for your memo ...
Страница 191: ... 180 MEMO Please use this page for your memo ...
Страница 211: ......





































































