





























-113-
Chapter 9 Force Sense Detection
9.1 Force Sense Detection
The force sense detection function detects the robot contact status using force sensor information.
By using this function, the moving direction can be switched by detecting contact during the movement,
and the work can be retried or error processing can be executed by detecting the work failure.
<Features>
1) Trigger conditions combining force data and position data can be set. (Mo trigger)
2) Interrupt processing for start-up and shut-down conditions can be performed for force sensor
data force detection setting values (set with Fsc On command conditions group (control
characteristics).
3) Sensor data and position data obtained when the force detection setting value is exceeded can
be retained as status variables.
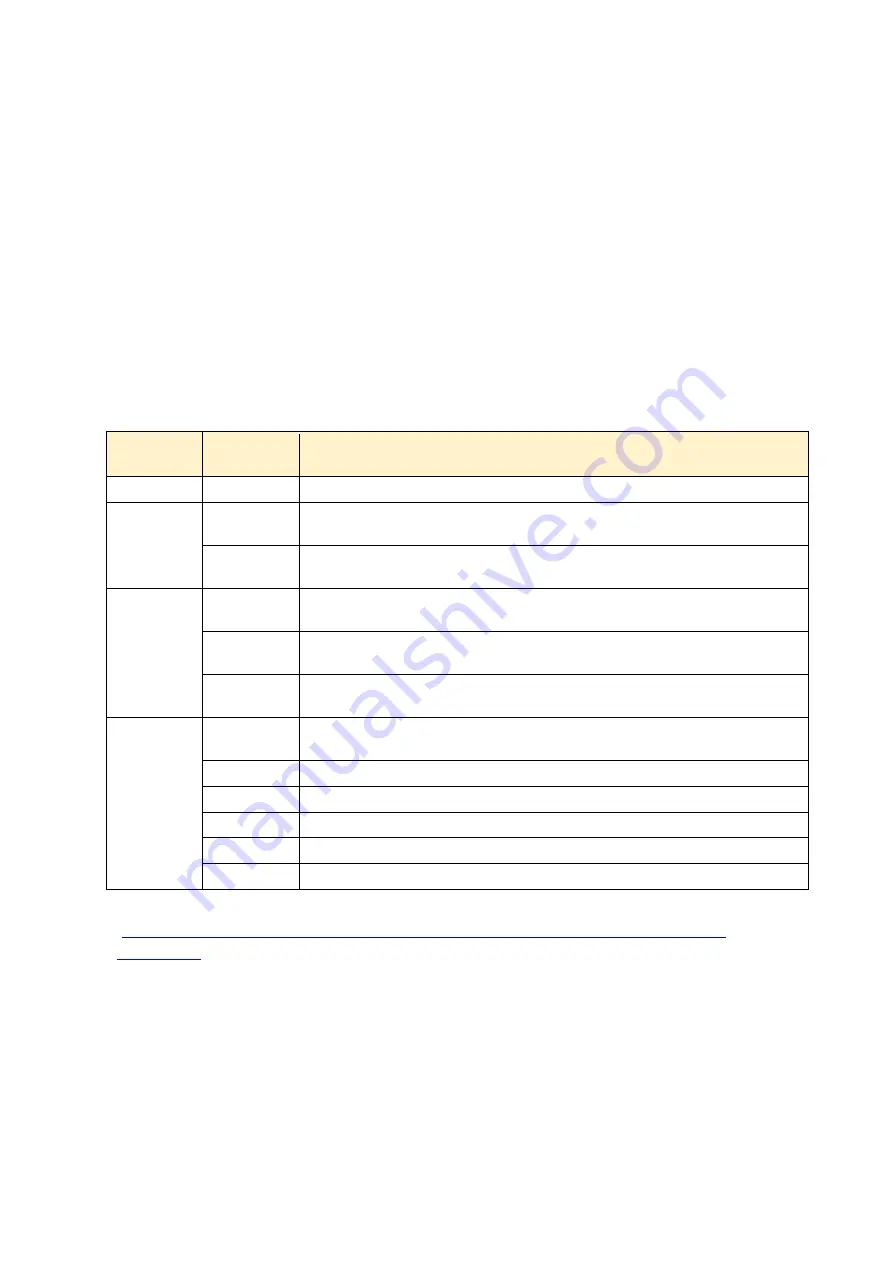
<Status variables for force sense detection function>
Class
Status
Variable
Function Overview
Mo trigger
M_MoTrg
Checks the Mo trigger status.
Force
detection
status
M_FsLmtS
Checks whether the force sensor data force detection setting value has
been exceeded.
P_FsLmtR
Checks the status of the current force sensor data with respect to the force
sensor data force detection setting value.
Data latch
P_FsLmtX
Checks/resets axes for which the force sensor data force detection setting
value is exceeded.
P_FsLmtP
Checks/resets the robot FB position when the force sensor data force
detection setting value is exceeded.
P_FsLmtD
Checks/resets the force sensor data when the force sensor data force
detection setting value is exceeded.
Data
referencing
P_FsMaxD Checks/resets the force sensor maximum data value during force sense
control.
P_FsCurD
Checks the current force sensor data.
P_FsCurP
Checks the current position command offset with force sense control.
M_FsRsltF
Checks the current force sensor resultant force.
M_FsRsltM Checks the current force sensor resultant moment.
M_FsCSts
Checks the force sense control enabled/disabled status.
* For the force detection setting value, refer to
Chapter5 5.4 (11) Specifying the force detection setting value (P_FsFLm0/P_FsFLm1,
".
Содержание MELFA BFP-A3614
Страница 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Страница 2: ......
Страница 8: ... Revision History Print Date Instruction Manual No Revision content 2018 07 31 BFP A3614 First print ...
Страница 33: ... 22 b CR800 R controller CN1 connector CR800 R controller front To OPT1 connector CPU module SSCNET III cable ...
Страница 34: ... 23 2 F series a CR750 D controller ...
Страница 35: ... 24 b CR751 D controller ...
Страница 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Страница 75: ... 64 MEMO Please use this page for your memo ...
Страница 95: ... 84 MEMO Please use this page for your memo ...
Страница 103: ... 92 MEMO Please use this page for your memo ...
Страница 111: ... 100 MEMO Please use this page for your memo ...
Страница 119: ... 108 MEMO Please use this page for your memo ...
Страница 123: ... 112 MEMO Please use this page for your memo ...
Страница 129: ... 118 MEMO Please use this page for your memo ...
Страница 133: ... 122 MEMO Please use this page for your memo ...
Страница 137: ... 126 MEMO Please use this page for your memo ...
Страница 143: ... 132 MEMO Please use this page for your memo ...
Страница 149: ... 138 MEMO Please use this page for your memo ...
Страница 153: ... 142 MEMO Please use this page for your memo ...
Страница 159: ... 148 MEMO Please use this page for your memo ...
Страница 171: ... 160 MEMO Please use this page for your memo ...
Страница 183: ... 172 MEMO Please use this page for your memo ...
Страница 191: ... 180 MEMO Please use this page for your memo ...
Страница 211: ......







































































