





























-175-
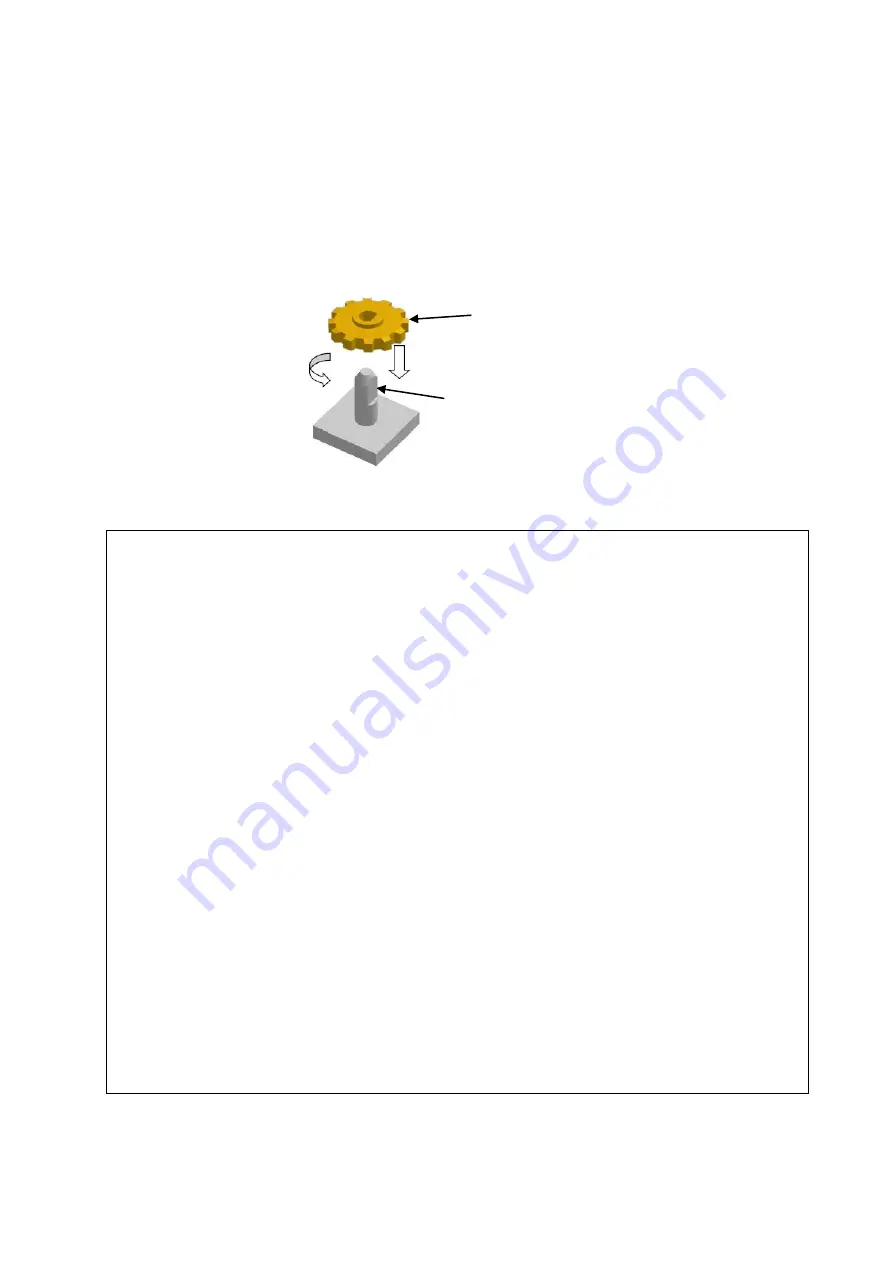
(2) Phase Focusing Push
Operation details
The robot inserts into a metal axis while searching for a d-cut gear phase.
The robot rotates in the C-axis direction while pushing softly in the Z-direction with robot stiffness
softened by stiffness control.
When the gear and metal axis phases match, the moment around the Z-axis (Mz) increases.
The Mz increase is detected and push work is started.
Program example
(Continue to the next page
→
)
D-cut gear
Pushes while rotating.
Metal axis
Mvs P2
1 '------------------------------------------------------
2 ' Appendix 6 Reference Case (2) Phase focusing push
3 '------------------------------------------------------
4 '[Control mode (0)]
5 P_FsStf0=(+0.00,+0.00,+3.00,+0.00,+0.00,+0.50)(0,0)
'Stiffness coefficient [N/mm]
6 P_FsDmp0=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0)
'Damping coefficient
7 P_FsMod0=(+2.00,+2.00,+2.00,+0.00,+0.00,+2.00)(0,0)
'Force control mode (X,Y,Z,C: stiffness control)
8 M_FsCod0 = 0
'Force sense control coordinate system (tool)
9 '[Control characteristics (0)]
10 P_FsGn0 =(+2.50,+2.50,+2.50,+0.00,+0.00,+2.50)(0,0)
'Force control gain [
μ
m/N]
11 P_FsFLm0=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.05)(0,0) 'Force detection setting value [N] (Mz=0.05[Nm])
12 P_FsFCd0=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Force control
13 P_FsSpd0=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0)
'Sets speed control mode speed.
14 P_FsSwF0=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Sets force/speed judgment value.
15 '[Control characteristics (-1)]
16 P_FsGn1 =(+2.50,+2.50,+0.00,+0.00,+0.00,+3.00)(0,0)
'Force control gain [μm/N] (Z axis=0.0[μm/N])
17 P_FsFLm1=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Force detection setting value [N]
18 P_FsFCd1=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Force control
19 P_FsSpd1=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0)
'Sets speed control mode speed.
20 P_FsSwF1=(+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Sets force/speed judgment value.
21 '*** <Assembly work> ***
22 Mvs PStart
'Robot moves over insertion position.
23 Dly 1
Содержание MELFA BFP-A3614
Страница 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Страница 2: ......
Страница 8: ... Revision History Print Date Instruction Manual No Revision content 2018 07 31 BFP A3614 First print ...
Страница 33: ... 22 b CR800 R controller CN1 connector CR800 R controller front To OPT1 connector CPU module SSCNET III cable ...
Страница 34: ... 23 2 F series a CR750 D controller ...
Страница 35: ... 24 b CR751 D controller ...
Страница 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Страница 75: ... 64 MEMO Please use this page for your memo ...
Страница 95: ... 84 MEMO Please use this page for your memo ...
Страница 103: ... 92 MEMO Please use this page for your memo ...
Страница 111: ... 100 MEMO Please use this page for your memo ...
Страница 119: ... 108 MEMO Please use this page for your memo ...
Страница 123: ... 112 MEMO Please use this page for your memo ...
Страница 129: ... 118 MEMO Please use this page for your memo ...
Страница 133: ... 122 MEMO Please use this page for your memo ...
Страница 137: ... 126 MEMO Please use this page for your memo ...
Страница 143: ... 132 MEMO Please use this page for your memo ...
Страница 149: ... 138 MEMO Please use this page for your memo ...
Страница 153: ... 142 MEMO Please use this page for your memo ...
Страница 159: ... 148 MEMO Please use this page for your memo ...
Страница 171: ... 160 MEMO Please use this page for your memo ...
Страница 183: ... 172 MEMO Please use this page for your memo ...
Страница 191: ... 180 MEMO Please use this page for your memo ...
Страница 211: ......







































































