


























OPERATION
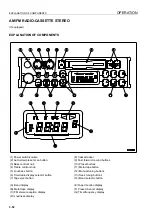
EXPLANATION OF COMPONENTS
3-39
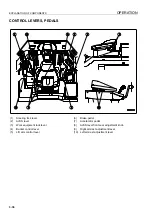
LIFT ARM CONTROL LEVER
This lever (5) is used to operate the lift arm.
Position (A): RAISE
When the lever is pulled further from the RAISE position, the
lever stops at that position (detent position). When the lift arm
reaches the maximum height, the lever returns to the HOLD
position.
Position (B): HOLD
The lift arm is stopped and held in position.
Position (C): LOWER
Position (D): FLOAT
The lift arm moves freely under external force.
For details of the method of operation when using the remote
position, see “REMOTE POSITIONER (3-101)“.
Raise
Lower
Содержание WA800-3E0
Страница 2: ......
Страница 3: ...FOREWORD 11...
Страница 27: ...SAFETY SAFETY LABELS 2 5 LOCATION OF SAFETY LABELS 2...
Страница 66: ...GENERAL VIEW OPERATION 3 4...
Страница 84: ...EXPLANATION OF COMPONENTS OPERATION 3 22 SWITCHES 3...
Страница 224: ...TROUBLESHOOTING OPERATION 3 162...
Страница 225: ...MAINTENANCE 14 WARNING Please read and make sure that you understand the SAFETY section before reading this section...
Страница 309: ...SPECIFICATIONS 15...
Страница 330: ...HANDLING MACHINES EQUIPPED WITH VHMS ATTACHMENTS OPTIONS 6 20...
Страница 331: ...INDEX 17...
Страница 332: ...INDEX 7 2...
Страница 335: ...COLOPHON 18...






















































