Example (speed setpoint for homing):
With sercos
®
, the units are switched over to “incremental” in the servo amplifier. For the
VREF homing speed, this means:
VREF = Increments per 250µs based on PRBASE
PRBASE = 20bit = 1048576
VREF = 262 =>
(262*4000)/1048576 per sec. => 1048000/1048576 = approx. 1 rev/s = 60 rpm
The default scaling on sercos
®
(Master) is 10,000 rpm
A target value of 600,000 for IDN 41 then corresponds to
600,000/10,000 = 60 rpm => VREF 262
NREF
=
IDNP 3027
VREF
=
IDN 41
DREF
=
IDN 147 Bit 0 (but only DREF 0 or 1 available)
IDNP 3068 also provides 2.
MH
=
IDN 148
REFMODE =
IDNP 3067
INxMODE
=
IDNP 300x (x = 0...4)
ROFFS
=
IDN 52 motor encoder
ROFFS
=
IDN 54 external encoder, if configured via EXTPOS
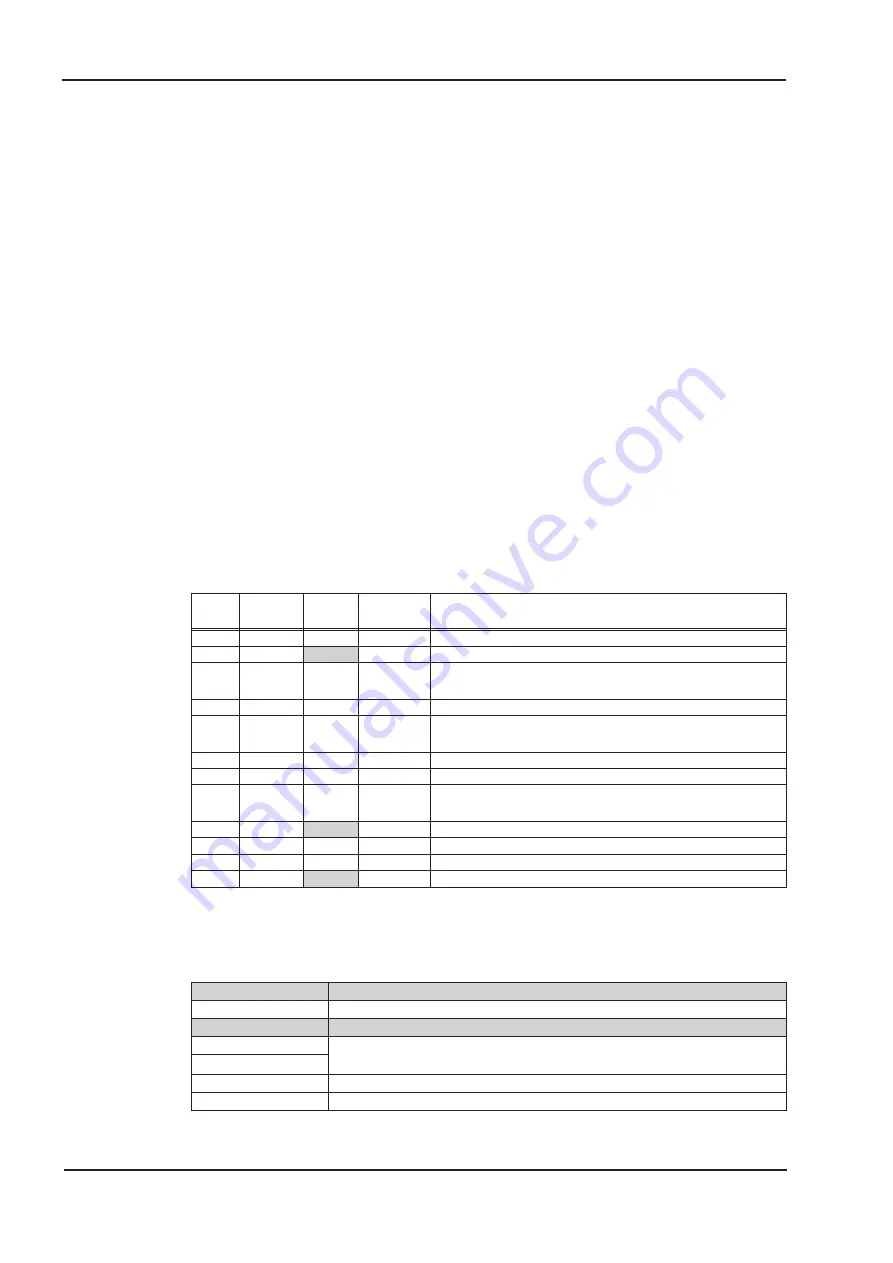
IDN 147 settings
Bit
Hex
Active
at
Suppor-
ted
Meaning
0
0x0001
Yes
0 = positive direction; 1 = negative direction
1
0x0002
0
No
Edge evaluation of the reference switch
2
0x0004
Yes
Reference switch connection to
0 = control system; 1 = drive
3
0x0008
Yes
Encoder 0 = motor encoder 1 = external encoder
4
0x0010
Yes
Release NC homing
0 = (reference IDN 407); 1 = only IDN 407
5
0x0020
0
Yes
Evaluate reference switch
6
0x0040
0
Yes
Evaluate zero impulse
7
0x0080
Yes
Position after reference run
0 = any (IDNP 3029); 1 = IDN 52/54
8
0x0100
0
No
Reference run over distance in IDN 297
9
0x0200
1
Yes
Reference run to limit switch
10
0x0400
1
Yes
Reference run to stop with clamping torque
11-15
0
No
Not used
Bits that are not supported (highlighted grey) must be set to 0.
Combinations that lead to error messages:
Bit 1 = 1
Negative edge is not supported
Bit 7 = 0
Drive is always in position in IDN 52/54
Bit 8 = 1
Path is not supported
Bit 5 = 0 + Bit 2 = 0 Drive cannot evaluate the reference switch, since it is connected to
the control system.
Bit 4 = 0 + Bit 2 = 0
Bits 5,9,10
Only ever one of these bits can be active at any time.
Bit 3 = 1
However, EXTPOS is <= 0, i.e. no external encoder is active
112
sercos
®
for S300/S700
Appendix
04/2016
Kollmorgen