





























54
Force Control Products
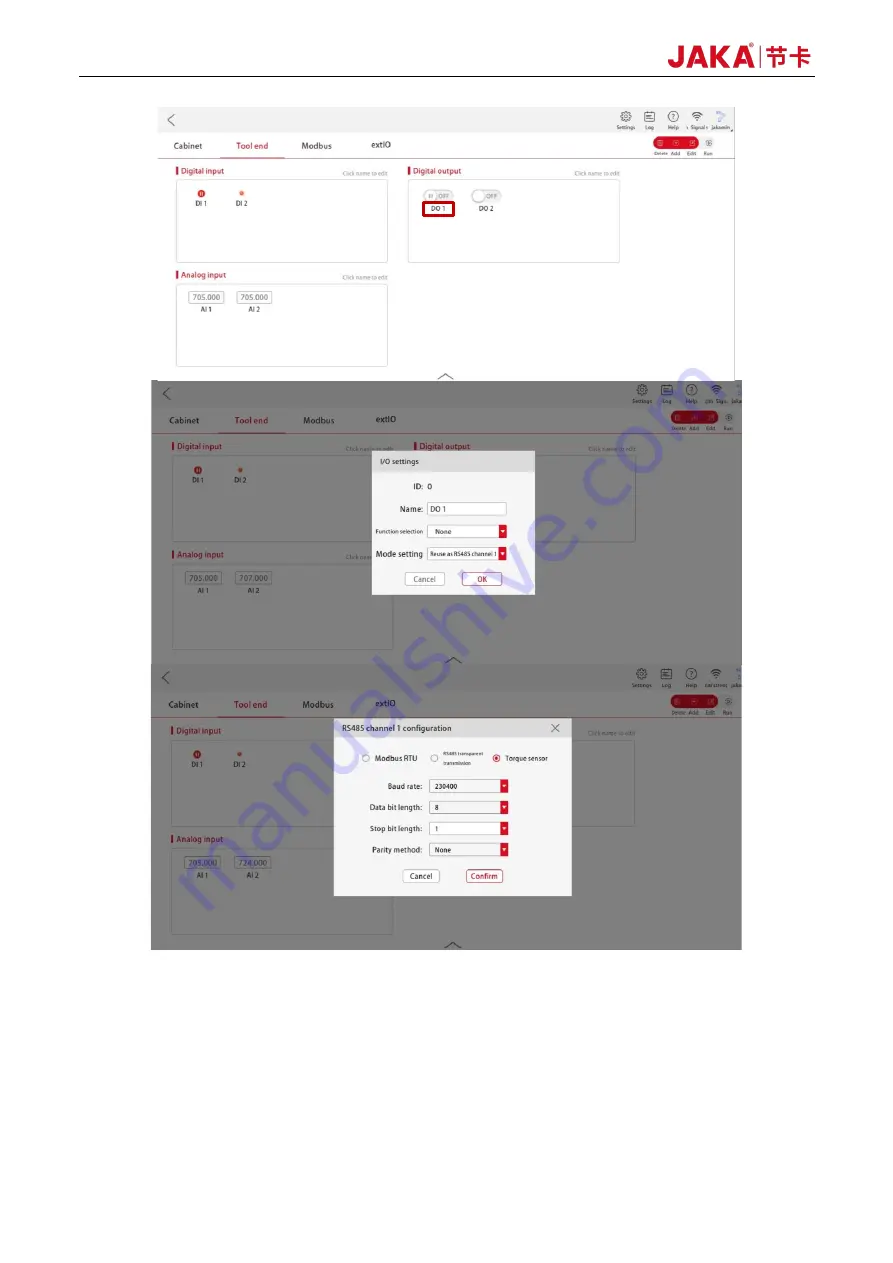
Figure 3-6 RS485 Channel Configuration Interface
f.
As shown in Figure 3-7, tap [Settings] at the upper right of the Home page, then tap [Hardware and
communication] → [End sensor] to enter the sensor configuration interface. Select the sensor type VI,
then tap [Confirm] (Ensure the sensor brand is set successfully), and tap the toggle switch on the right
to change its status from [Edit] to [Run]. Then the sensor can communicate properly;
Note 1: If the communication fails, please check whether the sensor hardware is in good condition and
whether the wiring and configurations are correct. Then restart the sensor and the robot as follows:
Содержание Zu Series
Страница 1: ...JAKA ROBOTICS Force Control Products JAKA Se and JAKA Sp...
Страница 3: ......
Страница 4: ......
Страница 17: ...Version 3 1 0 13 M3 2 0 M4 4 0 M5 8 0 M6 13 0 M8 35 0...
Страница 41: ...Version 3 1 0 37 Figure 2 36 Installation and Dimensions of the Force Sensor Indicator light...
Страница 61: ...Version 3 1 0 57 Figure 3 8 Force Display Interface of the App...
Страница 75: ...Version 3 1 0 71 Figure 3 19 Force Display Interface of the App...
Страница 79: ...Version 3 1 0 75 Figure 3 21 Collision Detection Function Settings of JAKA Zu Sp...





































































