





























-162-
6 Gain Tuning
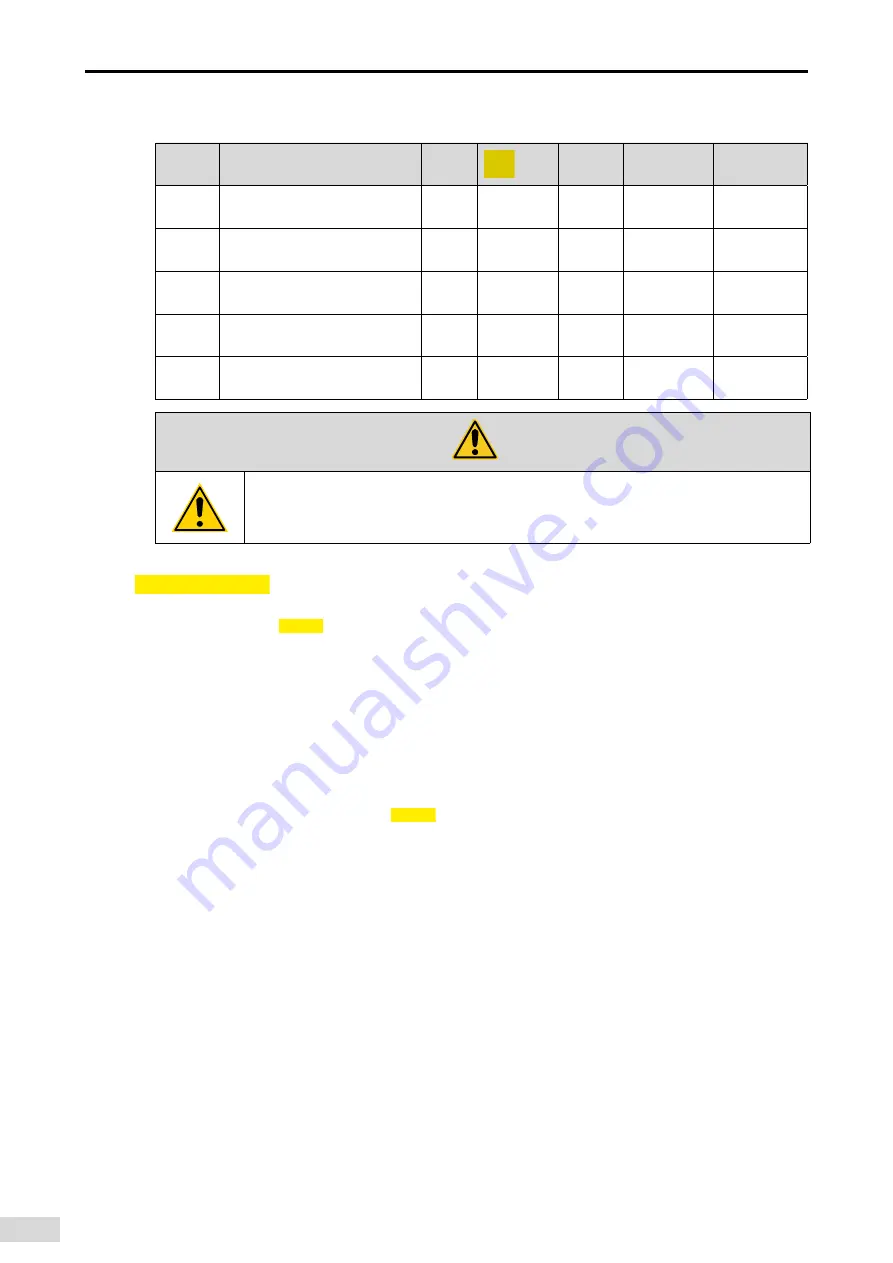
2 Related parameters:
Para. No.
Name
Min.
Unit
Value Range
Default
Setting
Condition
Effective Time
H08-00
Speed loop gain
0.1 Hz
1 to 20000
40
During
running
Immediately
H08-27
Speed observation cutoff
frequency
1 Hz
10 to 2000
170
During
running
Immediately
H08-28
Speed observation inertia
correction coefficient
1%
10 to 10000
100
During
running
Immediately
H08-29
Speed observation filter time
0.01 ms
0 to 2000
80
During
running
Immediately
H08-40
Speed observation selection
1
0 to 1
0
During
running
Immediately
$"65*0/
◆
Before using the speed observer, set H08-15 (Load inertia ratio) to a proper value or perform
inertia auto-tuning. A wrong inertia ratio will cause vibration.
◆
Setting H08-27, H08-28, or H08-29 to a too small or too large value will cause motor vibration.
6.5.8 Model Tracking
The model tracking control, which is only available in the position control mode, can be used to improve
the responsiveness and shorten the positioning time.
Parameters used by model tracking are normally set automatically through ITune or ETune along with the
gain parameters. However, manual tuning is needed in the following situations:
■
The auto-tuned results cannot fulfill the application needs.
■
Improving the responsiveness takes priority over the auto-tuned values.
■
Customized parameters for the gain or model tracking control are needed.
The block diagram for model tracking control is as follows.
Содержание SV660
Страница 178: ...177 6 Gain Tuning Figure 6 18 Example of the waveform...
Страница 359: ...358 10 Application Cases c Click OK d Click Yes...
Страница 360: ...359 10 Application Cases e Click OK f Click No...
Страница 362: ...361 10 Application Cases...
Страница 366: ...365 10 Application Cases 7 2 Controlling the servo operations through the PLC a Create a PLC program...
Страница 370: ...369 10 Application Cases b Add parameters to be monitored to monitor these parameters during PLC running...







































































