





























-135-
6 Gain Tuning
6 Gain Tuning
6.1 Overview
Set the gain parameters of the servo drive to proper values so that the servo drive can drive the motor as
quick and accurate as possible based on internal references or commands sent from the host controller.
Gain: Low
Gain: High
Gain: High+Feedforward
Position loop gain: 40.0 Hz
Speed loop gain: 25.0 Hz
Speed loop integral time constant: 50.00 ms
Speed feedforward gain: 0
Load inertia ratio: 30
Position loop gain: 80.0 Hz
Speed loop gain: 50.0 Hz
Speed loop integral time constant: 25.00 ms
Speed feedforward gain: 0
Load inertia ratio: 30
Position loop gain: 80.0 Hz
Speed loop gain: 50.0 Hz
Speed loop integral time constant: 25.00 ms
Speed feedforward gain: 50.0%
Load inertia ratio: 30
Figure 6-1
Example of gain settings
The gain is defined by the combination of multiple mutually-affected parameters (including position loop
gain, speed loop gain, filter and inertia ratio). Set these parameters to proper values to keep a balanced
performance.
NOTE
Perform a trial run through jogging before gain tuning to ensure the motor can work normally.
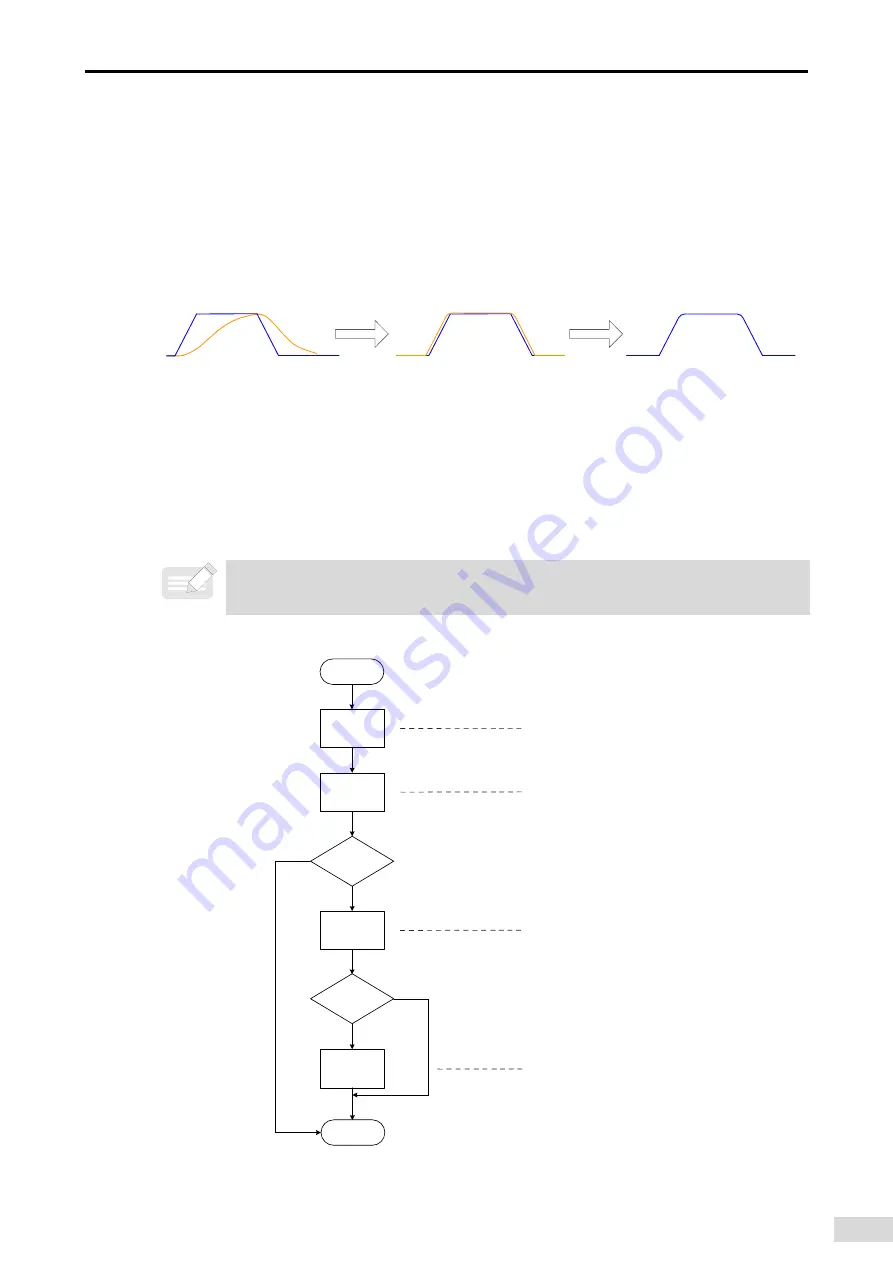
The following figure shows the general process of gain tuning.
Start
Inertia auto-
tuning
Gain
auto-tuning
Manual gain
tuning
End
Use offline or online inertia
auto-tuning. See Chapter 6.2
for details.
If gain auto-tuning cannot
fulfill the application needs
,
perform manual gain tuning.
See Chapter 6.5 for details.
Vibration
suppression
See Chapter 6.3 for details on
gain auto-tuning.
Yes
OK?
No
Yes
No
Perform vibration
suppression upon vibration.
See Chapter 6.7 for details.
OK?
Figure 6-2 Process of gain adjustment
Содержание SV660
Страница 178: ...177 6 Gain Tuning Figure 6 18 Example of the waveform...
Страница 359: ...358 10 Application Cases c Click OK d Click Yes...
Страница 360: ...359 10 Application Cases e Click OK f Click No...
Страница 362: ...361 10 Application Cases...
Страница 366: ...365 10 Application Cases 7 2 Controlling the servo operations through the PLC a Create a PLC program...
Страница 370: ...369 10 Application Cases b Add parameters to be monitored to monitor these parameters during PLC running...







































































