





























352
Part 3 Maintenance
1.3.2 Alarms, Causes and
Actions
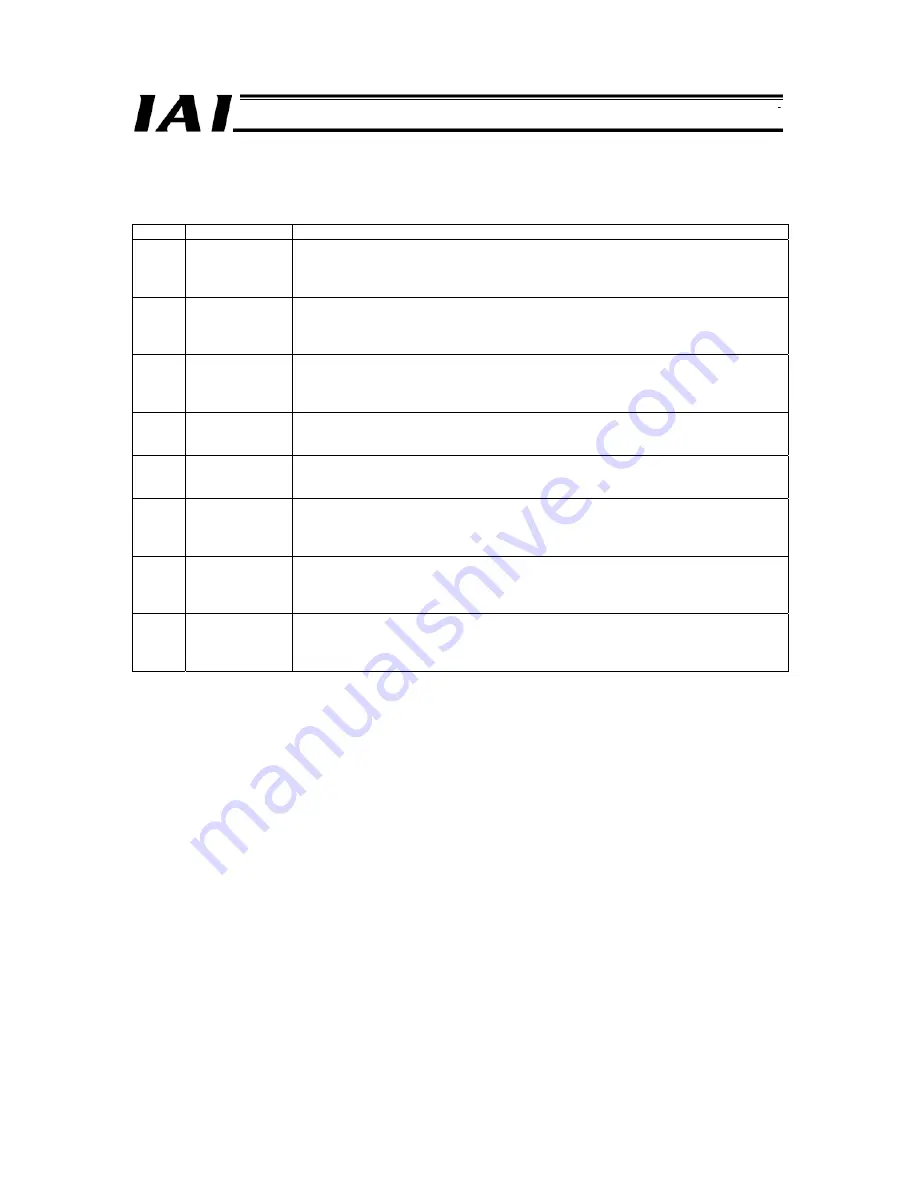
(1) Operation-cancellation alarms (These alarms can be reset with the reset signal.)
Code Alarm
name
Cause/action
080 Movement
command with
servo OFF
Cause:
A movement command was issued as a numerical command when the servo
was OFF.
Action:
Confirm that the servo is ON (SV or PEND is “1”) before issuing a movement
command.
083 Numerical
command before
home return
Cause:
A numerical command involving an absolute position was issued before home
return was completed. (Simple direct or direct numerical command mode)
Action:
Perform home return and confirm a completion signal (HEND) before issuing a
movement command.
084 Movement
command during
home return
Cause:
A movement command was issued as a numerical command while home return
was in progress.
Action:
Perform home return and confirm a completion signal (HEND) before issuing a
movement command.
085 Position
number
error during
movement
Cause:
A position number not yet registered in the position table was specified in the
positioner mode.
Action:
Check the position table again.
090 Software
reset
with servo ON
Cause:
A software reset command was received when the servo was ON.
Action:
Send a software reset command to the controller after confirming that the servo
is OFF (SV is “0”).
091 Position
number
error during
teaching
Cause:
An invalid position number was specified when writing the current position via
teaching operation.
Action:
768 position numbers from 0 to 767 can be used with the RACON and RPCON.
Use position numbers within this range.
092 PWRT
signal
detection during
movement
Cause:
The current position write signal (PWRT) was input during jogging when
teaching operation was performed in the positioner mode.
Action:
Input the PWRT signal after confirming that no jog button is pressed and that
the axis is stopped (MOVE signal is “0”).
093 PWRT
signal
detection before
home return
Cause:
The current position write signal (PWRT) was input before home return was
completed when teaching operation was performed in the positioner mode.
Action:
Input the HOME signal first to perform home return and confirm the completion
of home return (HEND signal is “1”) before inputting the PWRT signal.
Содержание RoboNet
Страница 1: ...Operation Manual Forth Edition ROBONET ...
Страница 242: ...222 Part 1 Specification 5 4 3 External Dimensions 50 from DIN rail center 35 mm DIN rail 69 3 from DIN rail surface ...
Страница 257: ...237 Part 2 Startup Chapter X Installed face down X Installed face up ...
Страница 354: ...334 ...
Страница 395: ...375 ...
Страница 396: ...376 ...
Страница 397: ...377 ...





















































