






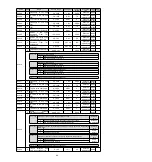










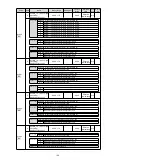








101
Pn No.
Size
Name
Setting range
Setting Unit
Factory
setting
Available
time
Categor
y
Model
Pn518
2 Input
signal
inversion
setting 2
0000
~
1111
-
0000
Power
restart
Setup
-
n.
X
CN1-IN4 terminal input signal inversion
0
Not reverse signal.
1
Reverses the signal.
n.
X
CN1-IN5 terminal input signal inversion
0
Not reverse signal.
1
Reverses the signal.
n.
X
CN1-IN6 terminal input signal inversion
0
Not reverse signal.
1
Reverses the signal.
n.X
CN1-IN7 terminal input signal inversion
0
Not reverse signal.
1
Reverses the signal.
Pn51B
4
Between
motor-load
position
Excessive
deviation
detected value
0
~
1073741824
1
Command
unit
1000
Effective
immediately Setup
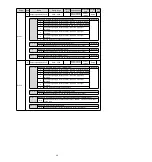
Pn51E
2
Warning
value
for
excessive
position
deviation
10
~
100
1%
100
Effective
immediately Setup
Pn520
4 Position deviation is too
large warning value
1
~
1073741823
1
Command
unit
5242880
Effective
immediately Setup
Pn522
4 Positioning
completion
amplitude
0
~
1073741824
1
Command
unit
7
Effective
immediately Setup
Pn524
4 NEAR signal range
1
~
1073741824
1
Command
unit
107374182
4
Effective
immediately Setup
Pn526
4
Warning
value
for
excessive
position
deviation when servo ON
1
~
1073741823
1
Command
unit
5242880
Effective
immediately Setup
Pn528
2
Warning
value
for
excessive
position
deviation when servo ON
10
~
100
1%
100
Effective
immediately Setup
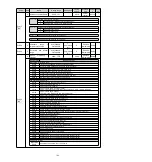
Pn529
2 The speed limit value when
the servo ON
0
~
10000
1 min
-1
10000
Effective
immediately Setup
Pn52A
2
The product value of 1
circle of full closed loop
rotation
0
~
100
1%
20
Effective
immediately
Adjust
ment
Pn52B
2 Overload warning value
1
~
100
1%
20
Effective
immediately Setup
Pn52C
2
Motor overload detection
base current decreases
ratings
10
~
100
1%
100
Power
restart
Setup
Pn52F
2 Monitoring display when
power is turned on
0000
~
0FFF
-
0FFF
Effective
immediately Setup
Pn530
2 Program JOG run class
switch
0000
~
0005
-
0000
Effective
immediately Setup
n.
X
Program JOG run parameter
0
(waiting time Pn535→ forward movement Pn531) * number of movements Pn536
1
(waiting time Pn535→ reverse movement Pn531) * number of movements Pn536
2
(waiting time Pn535→ forward movement Pn531) * number of movements Pn536
(waiting time Pn535→ reverse movement Pn531) * number of movements Pn536
3
(waiting time Pn535→ reverse movement Pn531) * number of movements Pn536
(waiting time Pn535→ forward movement Pn531) * number of movements Pn536
4
(waiting time Pn535→ forward movement Pn531→ waiting time Pn535→ reverse
movement Pn531)× number of movements Pn536
5
(wait time Pn535→ reverse movement Pn531→ wait time Pn535→ forward
movement Pn531)× movement times Pn536
n.
X
Appointment parameters (do not change it)
n.
X
Appointment parameters (do not change it)
n.X
Appointment parameters (do not change it)
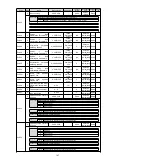
Pn531
4 Program
JOG
move
distance
0
~
1073741824
1
Command
unit
32768
Effective
immediately Setup
Pn533
2 Program JOG movement
speed
1
~
10000
1 min
-1
500
Effective
immediately Setup
Pn534
2 Program JOG acceleration
and deceleration time
2
~
10000
1 ms
100
Effective
immediately Setup
Pn535
2 Program JOG wait time
0
~
10000
1 ms
100
Effective
immediately Setup
Pn536
2 Number of program JOG
moves
0
~
1000
Times
1
Effective
immediately Setup







































































