





























46
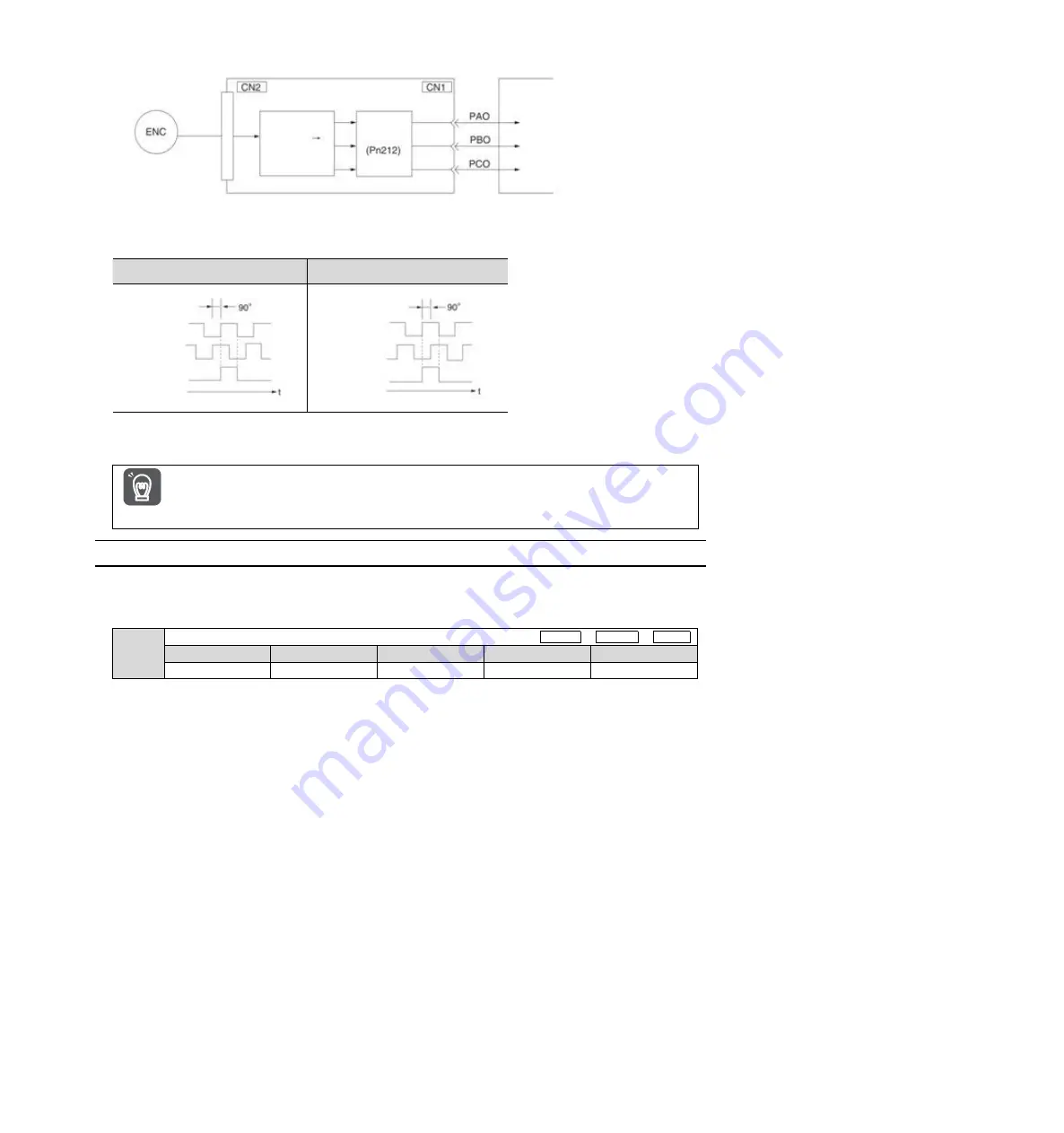
Output phase morphology
When rotating forward (forward
direction) (phase b 90 leading)
When reversing (negative direction)
(phase a 90 leading)
(Note) The pulse amplitude of the origin within the encoder 1 coil varies depending on the number of encoder divided pulses (Pn212)
and the encoder output resolution (Pn281). Same amplitude as phase A.
In reverse (negative direction) mode (Pn000 = n.
1), the output phase shape is the same as the above figure.
Important
When performing mechanical origin reset operation through servo-driven C-phase pulse output, please
make the servo motor run for more than 2 turns before operating. If this operation cannot be performed,
please set the speed of the servo motor below 600 min
-1
, and then perform origin reset. When the speed is
above 600 min
-1
, the C-phase pulse may not be correctly output.
6.5.2 Setting of Encoder frequency division pulse output
The following describes the setting method of encoder frequency division pulse output.
Encoder frequency division pulse count (Pn212) Settings
Pn212
Encoder frequency division pulse count
Speed
Position
Torque
Setting range
Setting Unit
Factory setting
Effective time
Category
16
~
1073741824
1 pitch /Rev
2500
Power restart
Setup
The number of pulses per revolution sent by the encoder is processed in the servo drive, and then is output
after frequency division according to the set value of Pn212.
Please set the output number of encoder frequency division pulses according to the system specifications of
mechanical and upper devices.
The setting of the frequency division pulse number of the encoder will be limited by the encoder resolution.
(Note) 1. The setting range of the encoder frequency division pulse number (Pn212) varies depending on the encoder resolution of
the servo motor used. If the setting conditions in the above table cannot be met, A.041 (abnormal frequency division pulse
output setting) will occur.
Example of correct setting: when Pn212 is 2500 [P/Rev]
Example of wrong setting: when Pn212 = 2501 [P/Rev] → setting scale is different from the above table, so output A.041
2. The upper limit of pulse frequency is about 1.6 Mpps. If the set value of encoder frequency division pulse number is too
high, the speed of servo motor will be limited. If the upper limit of the motor speed in the above table is exceeded, A.511
(frequency division pulse output overspeed) will occur.
Output Example: When Pn212 = 16 (16 pulses per turn), the output examples of encoder frequency-divided
pulse output phase A (PAO) signal and encoder frequency-divided pulse output phase B (PBO) signal are as
follows.
Serial
data
Servo unit
Serial Data
Pulse Conversion
Frequency
division loop
Upper device
A Phase
B Phase
C Phase
A Phase
B Phase
C Phase







































































