





























Chapter 3 Connections and Wiring
3-20
Revision June 2010
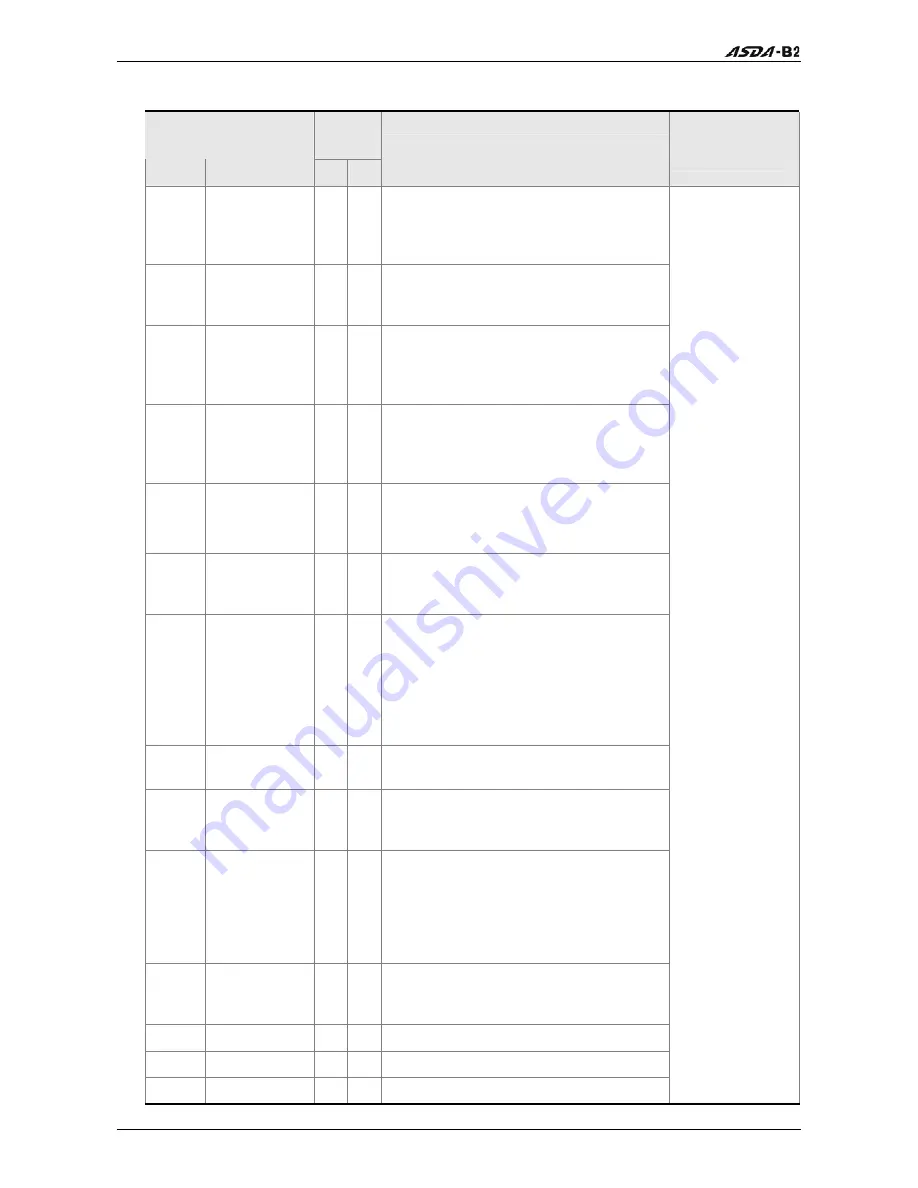
Table 3.B DO Signals
Pin No.
(Default)
DO
Signal
Assigned
Control Mode
+
-
Details
Wiring Diagram
(Refer to 3-3-3)
SRDY ALL 7
6
SRDY is activated when the servo drive
is ready to run. All fault and alarm
conditions, if present, have been
cleared.
SON Not
assigned - -
Servo ready (SRDY) is "ON" where the
servo is ready to run, NO fault / alarm
exists.
ZSPD ALL 5
4
ZSPD is activated when the drive
senses the motor is equal to or below
the Zero Speed Range setting as
defined in parameter P1-38.
TSPD
ALL
(except PT)
- -
TSPD is activated once the drive has
detected the motor has reached the
Target Rotation Speed setting as
defined in parameter P1-39.
TPOS PT, PT-S, PT-T 1 26
1.
When the drive is in PT mode, TPOS
will be activated when the position
error is equal and below the setting
value of P1-54.
TQL Not
assigned - -
TQL is activated when the drive has
detected that the motor has reached
the torques limits.
ALRM ALL 28
27
ALRM is activated when the drive has
detected a fault condition. (However,
when Reverse limit error, Forward limit
error, Emergency stop, Serial
communication error, and
Undervoltage these fault occur, WARN
is activated first.)
BRKR ALL -
-
BRKR is the control terminal of motor
brake.
OLW ALL -
-
OLW is activated when the servo drive
has detected that the motor has
reached the output overload level .
WARN ALL -
-
Servo warning output. WARN is
activated when the drive has detected
Reverse limit error, Forward limit error,
Emergency stop, Serial communication
error, and Undervoltage these fault
conditions.
S_CMP S,
Sz -
-
SP_CMP will be activated when the
speed error is equal and below the
setting value of P1-47.
SDO_0
ALL
-
- Output the status of bit00 of P4-06.
SDO_1
ALL
-
- Output the status of bit01 of P4-06.
SDO_2
ALL
-
- Output the status of bit02 of P4-06.
C5/C6/C7/C8
Содержание ASD-B2-0121-B
Страница 1: ......
Страница 13: ...Table of Contents xii Revision June 2010 This page intentionally left blank...
Страница 17: ...Chapter 1 Unpacking Check and Model Explanation 1 4 Revision June 2010 ECMA Series Servo Motor...
Страница 19: ...Chapter 1 Unpacking Check and Model Explanation 1 6 Revision June 2010 1 4 Servo Drive Features...
Страница 21: ...Chapter 1 Unpacking Check and Model Explanation 1 8 Revision June 2010 This page intentionally left blank...
Страница 25: ...Chapter 2 Installation and Storage 2 4 Revision June 2010 Minimum Clearances Side by Side Installation...
Страница 43: ...Chapter 3 Connections and Wiring 3 6 Revision June 2010 Figure 3 3 Three Phase Power Supply all models...
Страница 72: ...Chapter 3 Connections and Wiring Revision June 2010 3 35 3 5 2 Connection between PC and Connector CN3...
Страница 87: ...Chapter 4 Display and Operation 4 12 Revision June 2010 This page intentionally left blank...
Страница 100: ...Chapter 5 Trial Run and Tuning Procedure Revision June 2010 5 13 5 5 2 Load Inertia Estimation Flowchart...
Страница 131: ...Chapter 6 Control Modes of Operation 6 22 Revision June 2010 Time Domain...
Страница 153: ...Chapter 6 Control Modes of Operation 6 44 Revision June 2010 This page intentionally left blank...
Страница 267: ...Chapter 8 MODBUS Communications 8 18 Revision June 2010 This page intentionally left blank...
Страница 271: ...Chapter 9 Maintenance and Inspection 9 4 Revision June 2010 This page intentionally left blank...
Страница 291: ...Chapter 11 Specifications 11 8 Revision June 2010 11 3 Servo Motor Speed Torque Curves...







































































