





























V4.5
©2015-2019 AUBO.All rights reserved.
33
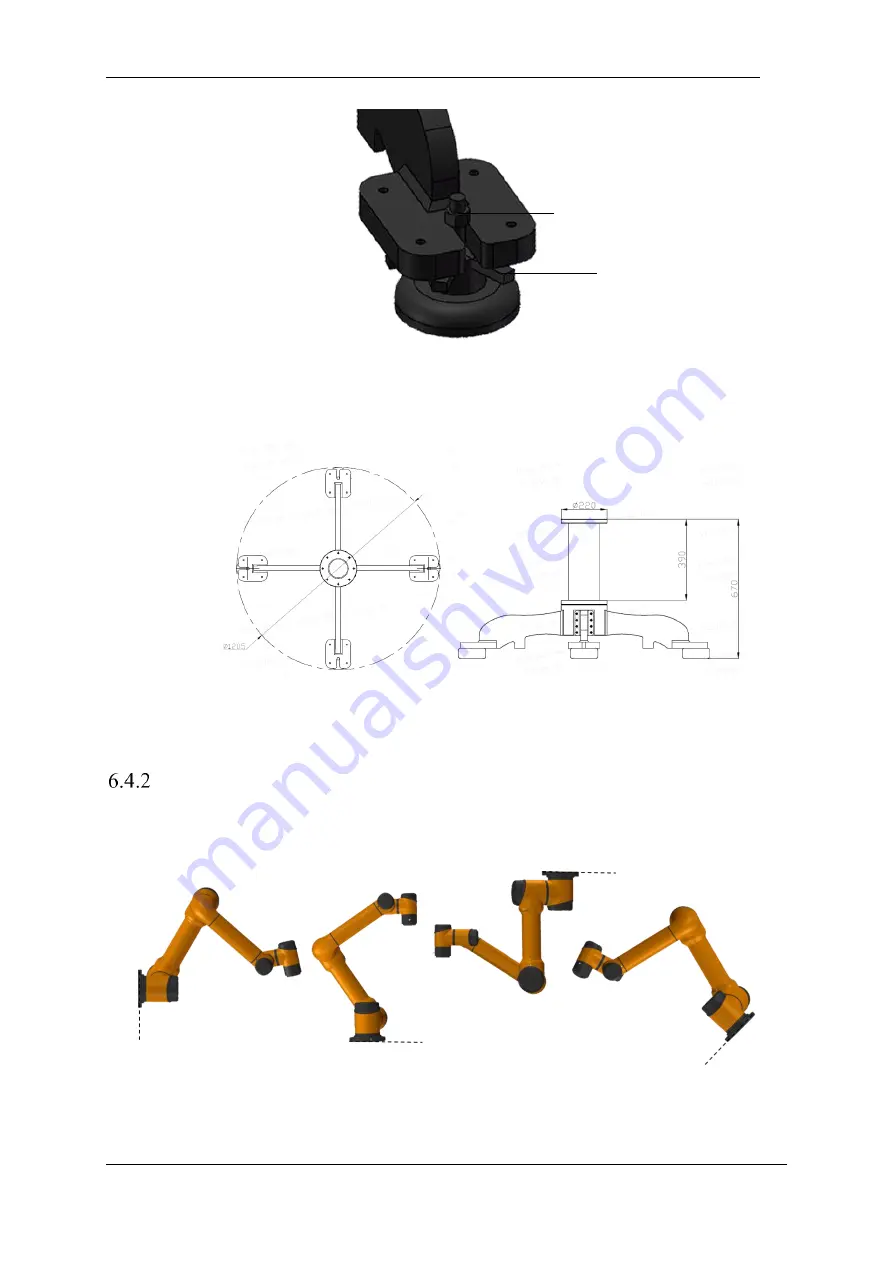
Figure 6-3
Diagram of manipulator base structur
e
The mechanical dimensions of the manipulator base structure are shown in Figure 6.4
Figure 6-4 Mechanical dimensions of the manipulator base structure (left: plan view; right: front view)
Manipulator Installation
The robot has a function of self-adaption for Installation pose. It can be installed in base, hoisting, mount on
wall or any specific installation method, as shown below:
Figure 6-5 Diagram of different installation poses
Using four M8 bolts to fix manipulator on the base. It’s recommend using two -6mm holes to install pins
to improve the installation accuracy. Mechanical dimensions is shown in Figure 6.6.
Nut
Plum blossom wheel
Содержание AUBO-i10
Страница 1: ...USER MANUAL AUBO i10 CB4 Please read this manual carefully before using the product...
Страница 2: ......
Страница 10: ...V4 5 2015 2019 AUBO All rights reserved vi...
Страница 26: ...V4 5 2015 2019 AUBO All rights reserved 22...
Страница 44: ...V4 5 2015 2019 AUBO All rights reserved 40...
Страница 56: ...V4 5 2015 2019 AUBO All rights reserved 52...
Страница 87: ...V4 5 2015 2019 AUBO All rights reserved 83...
Страница 118: ...V4 5 2015 2019 AUBO All rights reserved 114 Date Time tab Figure 10 39 Date Time tab Date Time tab can set date and time...
Страница 127: ...V4 5 2015 2019 AUBO All rights reserved 123...
Страница 161: ...V4 5 2015 2019 AUBO All rights reserved 157 Figure 11 43 script file editor...
Страница 179: ......



































































