





























V4.5
©2015-2019 AUBO.All rights reserved.
64
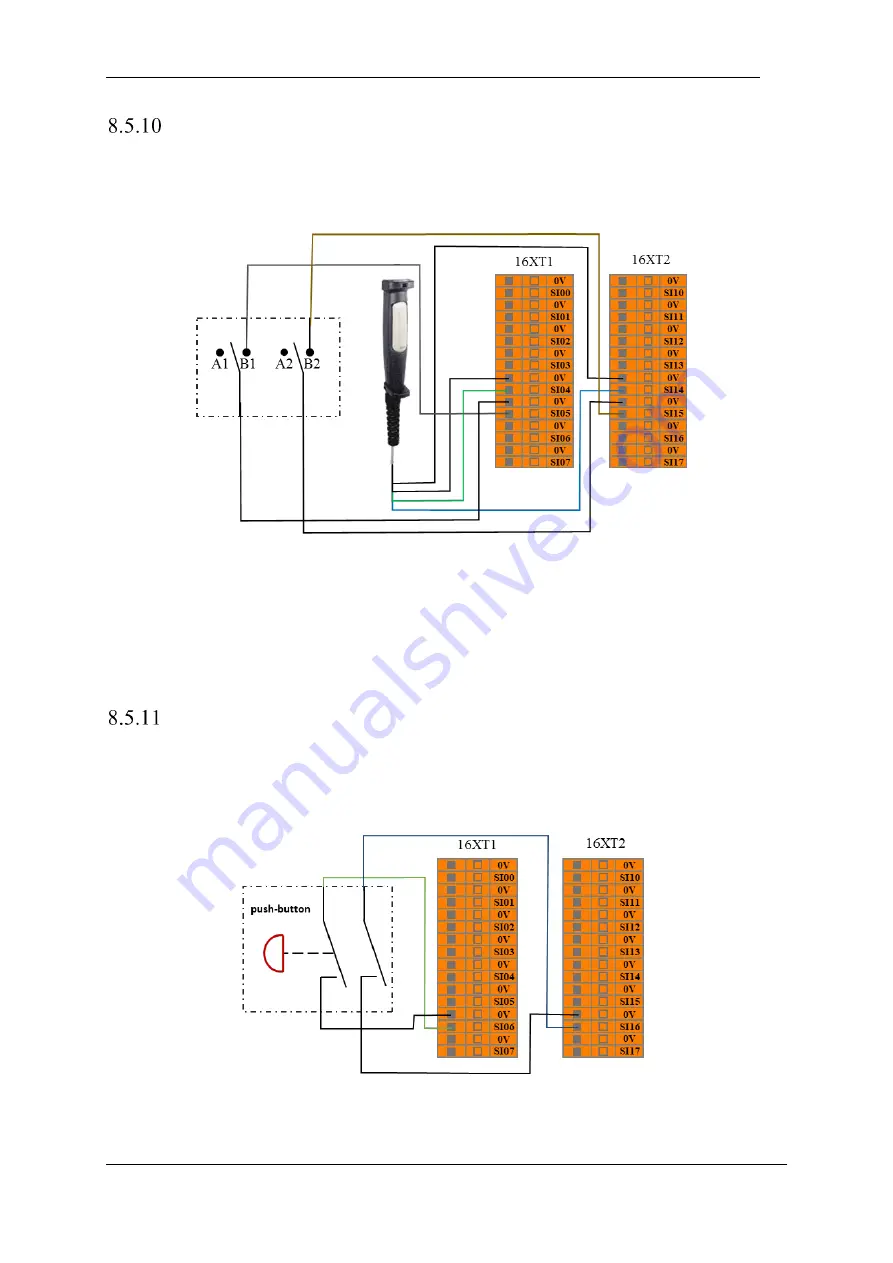
Operational Mode Input
Users can use this interface to connect an external safety device (mode selector switch, etc.) and select the
robot working mode. The user can refer to the following example, using the safety selector switch to connect
to the operation mode input interface. See the next figure.
Figure 8-11 operation mode input connection
When the user switches the selector switch to the A position, the robot enters the normal mode, and the user
can use the robot normally. When the user switches the selector switch to the B position, the robot enters the
verification mode. In this mode, only when the enabling device input is valid, the manipulator executes the
verficatipon project and operates normally. When the enabling device input is invalid, the robot stops
immediately.
Hand Guiding Enable Input
User can use this interface to receive external hand guiding enable singal input, then the robot enters hand
guiding mode. The user can refer to the following example,using the hand guiding function without the force
control button in the teach pendant.
Figure 8-12 hand guiding enable input
Содержание AUBO-i10
Страница 1: ...USER MANUAL AUBO i10 CB4 Please read this manual carefully before using the product...
Страница 2: ......
Страница 10: ...V4 5 2015 2019 AUBO All rights reserved vi...
Страница 26: ...V4 5 2015 2019 AUBO All rights reserved 22...
Страница 44: ...V4 5 2015 2019 AUBO All rights reserved 40...
Страница 56: ...V4 5 2015 2019 AUBO All rights reserved 52...
Страница 87: ...V4 5 2015 2019 AUBO All rights reserved 83...
Страница 118: ...V4 5 2015 2019 AUBO All rights reserved 114 Date Time tab Figure 10 39 Date Time tab Date Time tab can set date and time...
Страница 127: ...V4 5 2015 2019 AUBO All rights reserved 123...
Страница 161: ...V4 5 2015 2019 AUBO All rights reserved 157 Figure 11 43 script file editor...
Страница 179: ......





































































