





























Publication 1756-UM523F-EN-P - December 2006
Configure and Program the Controller
67
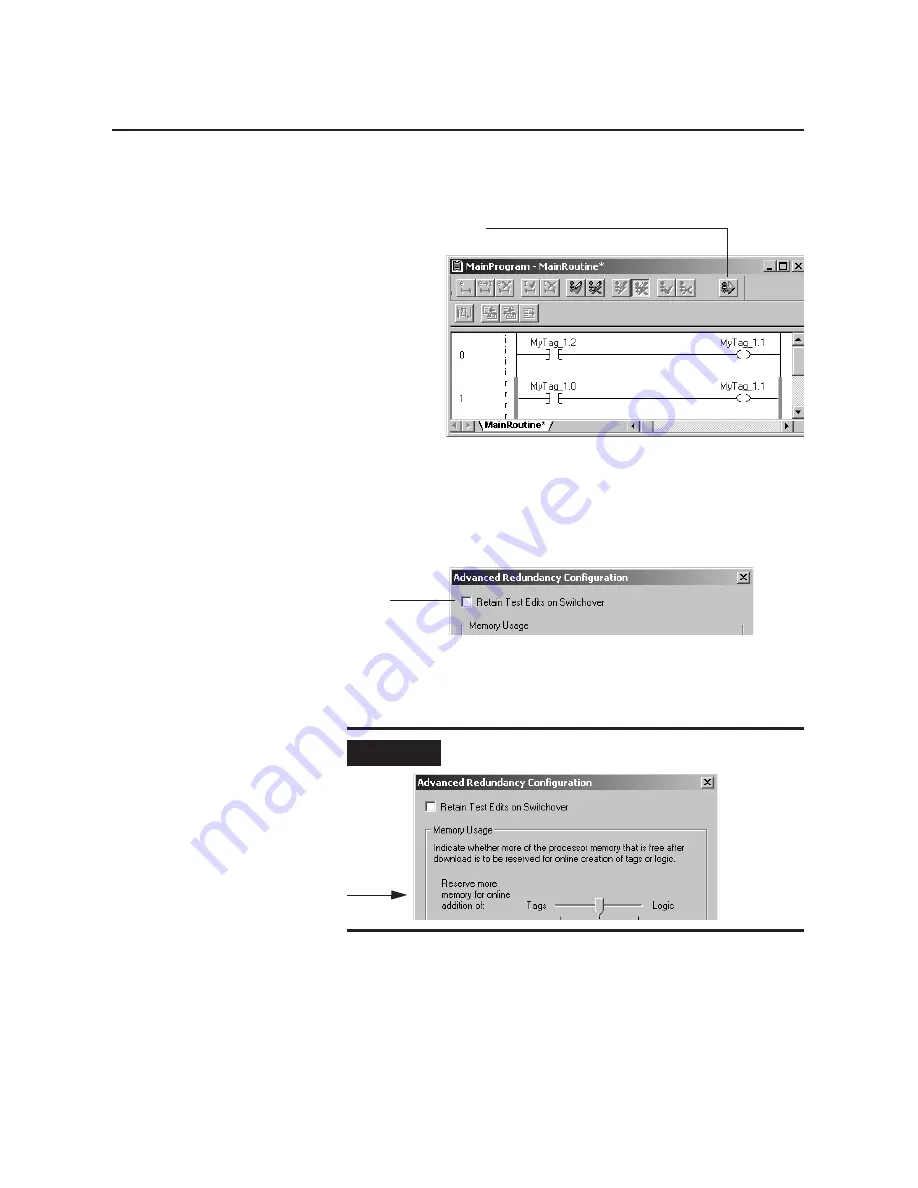
Be Aware That Finalizing Edits Removes Your Original Logic
The controller removes the original logic when you finalize all edits in
a program. If your changes cause a major fault and a switchover, the
new primary controller also faults. That is because there is no original
logic to go back to. For example, the new primary controller cannot
untest the edits.
Decide How You Want to Set Aside Unused Memory
When the secondary controller receives crossload data, it first buffers
tag data in a quarantine section of memory. When it has all of the data
and knows it is valid, it moves the data into the main memory area.
That is why a redundant controller requires twice as much memory
for tags as a nonredundant controller.
Finalize all edits in program.
This happens even if you set the
controller to untest edits on a
switchover.
IMPORTANT
We recommend that you leave the Memory Usage slider in the
middle, default position.
Содержание 1756-CNB/E
Страница 4: ...Publication 1756 UM523F EN P December 2006 Summary of Changes 4 Notes...
Страница 10: ...Publication 1756 UM523F EN P December 2006 10 Table of Contents...
Страница 26: ...Publication 1756 UM523F EN P December 2006 26 ControlLogix Redundancy System Overview Notes...
Страница 42: ...Publication 1756 UM523F EN P December 2006 42 Design the System Notes...
Страница 64: ...Publication 1756 UM523F EN P December 2006 64 Configure the System Redundancy Module Notes...
Страница 102: ...Publication 1756 UM523F EN P December 2006 102 Configure and Program the Controller Notes...
Страница 146: ...Publication 1756 UM523F EN P December 2006 146 Update Modules and Redundant Systems Notes...
Страница 162: ...Publication 1756 UM523F EN P December 2006 162 Set Up EtherNet IP Communication Across Subnets Notes...
Страница 168: ...Publication 1756 UM523F EN P December 2006 168 Convert an Existing System to Redundancy Notes...
Страница 178: ...Publication 1756 UM523F EN P December 2006 178 Redundant System Restrictions Notes...
Страница 185: ......







































































