















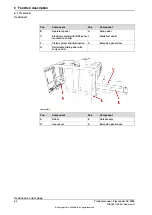













Outconveyor
During normal operation, signal exchange to robot occurs according to the following
handshaking sequence:
xx1800000185
Machine tool interface
As standard, the FlexLoader SC 6000 is delivered with the following functional
interface capability:
•
ABB CI502 series I/O node connected to the robot PROFINET bus.
•
Digital 24 V I/O interface (16 general inputs, 16 general outputs).
•
The physical interface is constituted by terminal blocks in the control cabinet.
•
The I/O node is physically located in the FlexLoader SC 6000 controller
cabinet.
Optionally, customer specific functional interface and I/O solutions can be used.
The following signals are defined for general use.
Description
Name
Spare input signal
diSpareInterface1
...
Spare input signal
diSpareInterface16
Spare output signal
doSpareInterface1
...
Spare output signal
doSpareInterface16
82
Product manual - FlexLoader SC 6000
3HAC051768-001 Revision: D
© Copyright 2014-2020 ABB. All rights reserved.
5 Interface
5.2 Function interface
Continued
Содержание FlexLoader SC 6000
Страница 1: ...ROBOTICS Product manual FlexLoader SC 6000 ...
Страница 8: ...This page is intentionally left blank ...
Страница 12: ...This page is intentionally left blank ...
Страница 78: ...This page is intentionally left blank ...
Страница 172: ...This page is intentionally left blank ...
Страница 174: ...This page is intentionally left blank ...
Страница 176: ...This page is intentionally left blank ...
Страница 178: ...This page is intentionally left blank ...
Страница 182: ...This page is intentionally left blank ...
Страница 184: ...This page is intentionally left blank ...
Страница 186: ...This page is intentionally left blank ...
Страница 192: ...This page is intentionally left blank ...
Страница 224: ...This page is intentionally left blank ...
Страница 283: ......







































































