





























Note
Action
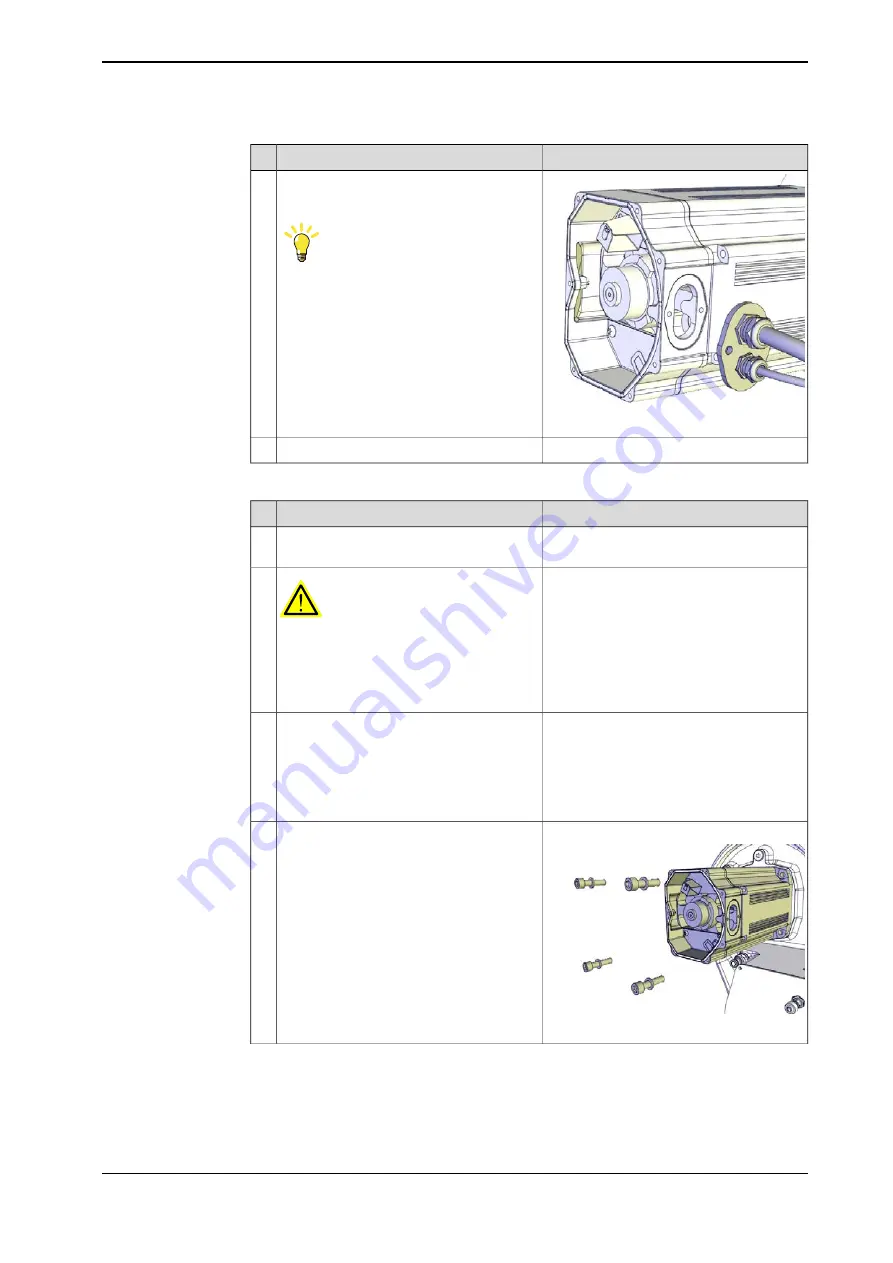
xx1200001067
Remove the cable gland cover.
Make sure the gasket is not damaged.
Tip
Make a note in which direction the cable
gland hole is facing, if the motor will be re-
moved too. The motor shall be refitted in
the same position.
5
Use caution and pull out the motor cables.
6
Removing the axis-2 motor
Note
Action
Before removing the motor, make sure that
the axis-2 gearbox is completely drained.
1
DANGER
When releasing the holding brakes of the
motor, the lower arm will be movable and
may fall down if not secured. Verify that the
lower arm is secured as previously de-
scribed, before continuing.
2
To release the brake, connect the 24 VDC
power supply.
3
Connect to connector R2.MP2, axis-2 mo-
tor:
•
+ = pin 2
•
- = pin 5
Bits extender: 3HAC12342-1
xx1200001117
Remove the attachment screws.
Use a bits extender in order to reach the
screws.
4
Continues on next page
Product manual - IRB 6790
439
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.7.2 Replacing the axis-2 motor
Continued
Содержание IRB 6790
Страница 1: ...ROBOTICS Product manual IRB 6790 ...
Страница 2: ...Trace back information Workspace 20A version a8 Checked in 2020 03 09 Skribenta version 5 3 033 ...
Страница 8: ...This page is intentionally left blank ...
Страница 16: ...This page is intentionally left blank ...
Страница 38: ...This page is intentionally left blank ...
Страница 164: ...This page is intentionally left blank ...
Страница 612: ...This page is intentionally left blank ...
Страница 638: ...This page is intentionally left blank ...
Страница 644: ...This page is intentionally left blank ...
Страница 658: ...This page is intentionally left blank ...
Страница 660: ...This page is intentionally left blank ...
Страница 667: ......







































































