





























7 Wiring
7.4.5 I/O Signal (CN1) Names and Functions
7-26
7.4.5 I/O Signal (CN1) Names and Functions
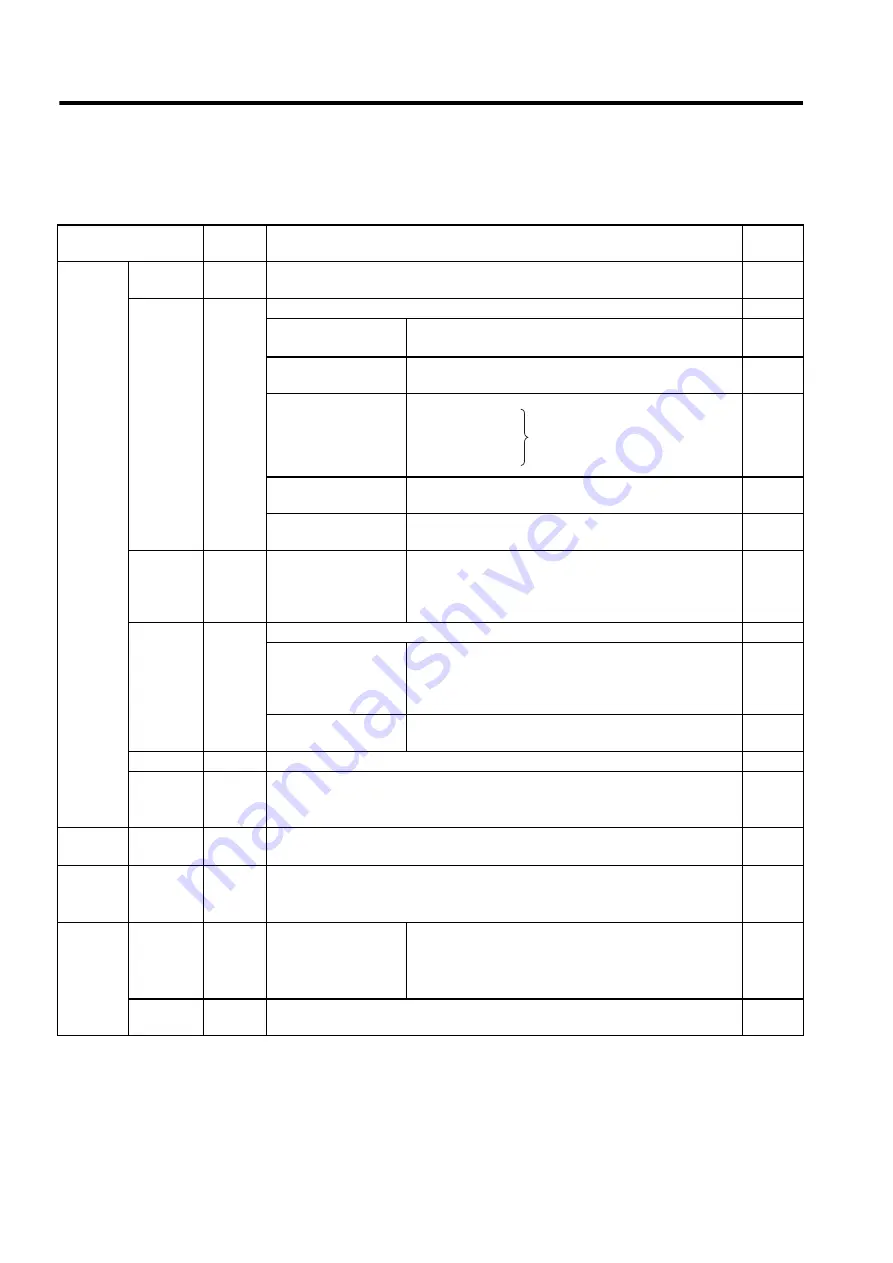
(1) Input Signals
Note: 1. Pin numbers in parentheses () indicate signal grounds.
2. The functions allocated to /S-ON, /P-CON. P-OT, N-OT, /ALM-RST, /P-CL, and /N-CL input
signals can be changed by using the parameters. Refer to
8.3.2 Input Circuit Signal Allocation
.
3. The voltage input range for speed and force references is a maximum of
±
12 V.
Signal Name
Pin No.
Function
Refer-
ence
Common
/S
-
ON
40
Servo ON: Turns ON the linear servomotor when the gate block in the inverter is
released.
9.6.1
/P
-
CON
41
Function selected by parameter.
−
Proportional control
reference
Switches the speed control loop from PI (proportional/
integral) to P (proportional) control when ON.
9.7.2
10.4.4
Direction reference
With the internal set speed selected: Switch the movement
direction.
9.10.2
Control mode
switching
9.12
Zero-clamp reference
Speed control with zero-clamp function: Reference
speed is zero when ON.
9.7.6
Reference pulse block
Position control with reference pulse stop: Stops reference
pulse input when ON.
9.8.7
P
-
OT
N
-
OT
42
43
Forward run
prohibited
Reverse run
prohibited
Overtravel prohibited: Stops linear servomotor when mov-
able part travels beyond the allowable range of motion.
9.6.3
/P
-
CL
/N
-
CL
45
46
Function selected by parameter.
−
Forward external force
limit ON
Reverse external force
limit ON
Current limit function enabled when ON.
9.11.2
9.11.4
Internal speed
switching
With the internal set speed selected: Switches the
internal speed settings.
9.10
/ALM
-
RST
44
Alarm reset: Releases the servo alarm state.
9.13.1
+24VIN
47
Control power supply input for sequence signals: Users must provide the +24 V
power supply.
Allowable voltage fluctuation range: 11 to 25 V
7.4.6
Speed
V
-
REF
5 (6)
Speed reference speed input:
±
2 to
±
10 V/rated motor speed (Input gain can be
modified using a parameter.)
9.7.2
9.9.4
Force
T
-
REF
9 (10)
Force reference input:
±
1 to
±
10 V/rated motor force (Input gain can be modified using
a parameter.)
9.9.2
9.11.3
9.11.4
Position
PULS
/PULS
SIGN
/SIGN
7
8
11
12
Reference pulse input
for only line driver
Input mode is set from the following pulses.
• Sign + pulse string
• CCW/CW pulse
• Two-phase pulse (90
°
phase differential)
9.8.1
CLR
/CLR
15
14
Positional error pulse clear input: Clears the positional error pulse during position con-
trol.
9.8.1
Position
↔
speed
Position
↔
force
Force
↔
speed
Enables control mode switching.
Summary of Contents for SGLFW
Page 270: ...9 3 9...





















































