





























8.3 Advanced Autotuning
8-21
8
Adjustments
(1) Preparation
The following conditions must be met to perform advanced autotuning.
• The main circuit power supply must be ON.
• There must be no overtravel.
• The servomotor power must be OFF.
• The control method must not be set to torque control.
• The gain selection switch must be in manual switching mode (Pn139.0 = 0).
• Gain setting 1 must be selected.
• All alarms and warning must be cleared.
• The write prohibited setting parameter must be set to Write permitted.
• The tuning-less function must be disabled (Pn170.0 = 0).
Supplemental Information
• If advanced autotuning is started while the SERVOPACK is in speed control, the mode will change to posi-
tion control automatically to perform advanced autotuning. The mode will return to speed control after com-
pleting autotuning. To execute advanced autotuning in speed control, set the mode selection to 1.
(2) When Advanced Autotuning Cannot Be Performed
Advanced autotuning cannot be performed normally under the following conditions. Refer to
8.4 Advanced
Autotuning by Reference
and
8.5 One-parameter Tuning
for details.
• The machine system can work only in a single direction.
• The operating range is within 0.5 rotation.
Refer to
8.4 Advanced Autotuning by Reference
for details on advanced autotuning with a reference input.
Refer to
8.5 One-parameter Tuning
for details on one-parameter tuning.
(3) When Advanced Autotuning Cannot Be Performed Successfully
Advanced autotuning cannot be performed successfully under the following conditions. Refer to
8.4
Advanced Autotuning by Reference
and
8.5 One-parameter Tuning
for details.
• The operating range is not applicable.
• The moment of inertia changes within the set operating range.
• The machine has high friction.
• The rigidity of the machine is low and vibration occurs when positioning is performed.
• The position integration function is used.
• P control operation (proportional control) is used.
Note:If a setting is made for calculating the moment of inertia, an error will result when P control operation is selected
using /V_PPI of the servo command output signals (SVCMD_IO) while the moment of inertia is being calculated.
CAUTION
• Because advanced autotuning adjusts the SERVOPACK during automatic operation, vibration or over-
shooting may occur. To ensure safety, perform advanced autotuning in a state where the SERVOPACK
can come to an emergency stop at any time.
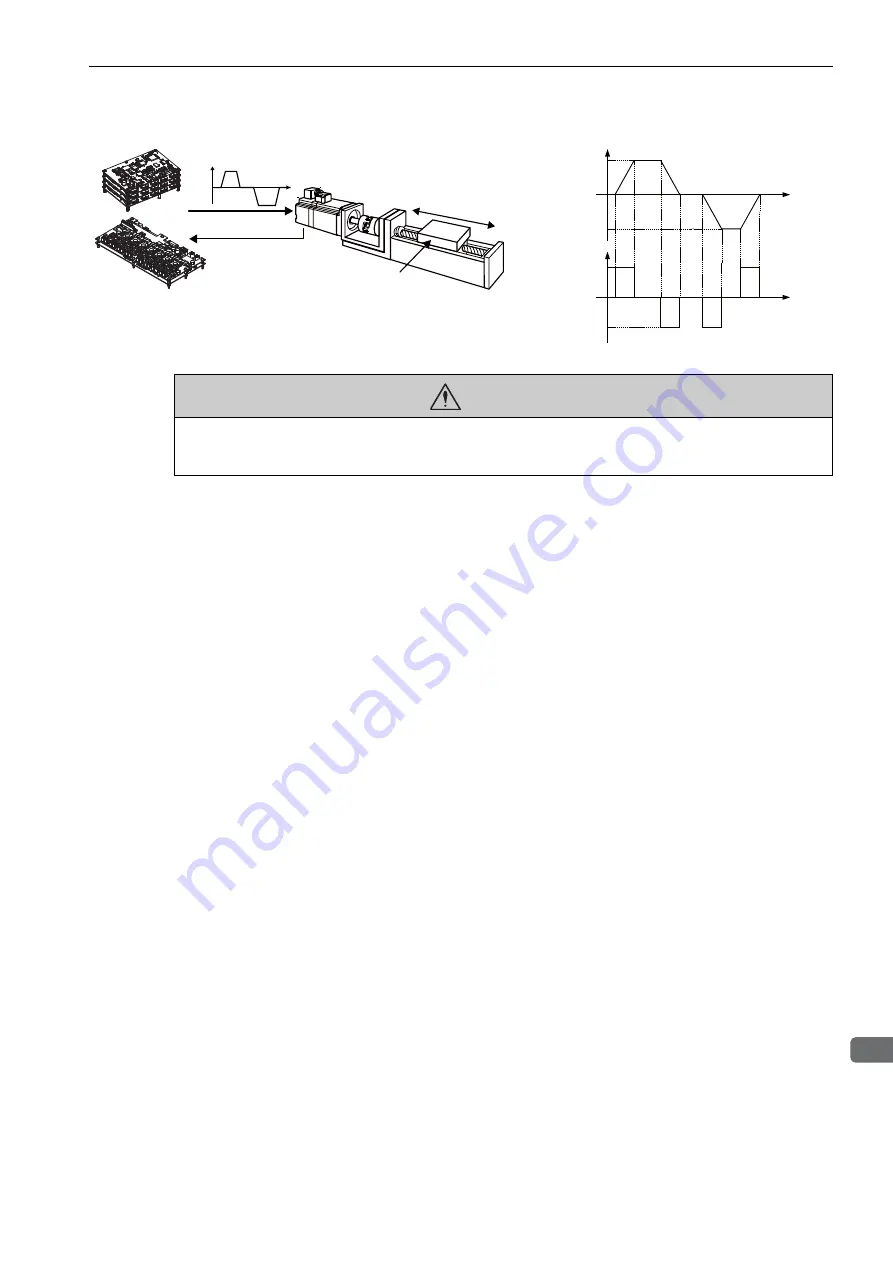
Travel
distance
SERVOPACK
Movement
Speed
Reference
Response
Execute advanced autotuning
after a JOG operation to
move the position to ensure a
suitable movement range.
t: time
t: time
Rated motor
speed
2/3
Rated motor
speed
2/3
Rated motor
torque
:
Approx. 100%
Rated motor
torque
:
Approx. 100%
Automatic operation





















































