




























Manual – MOVIDRIVE® MDX60B/61B Communication and Fieldbus Unit Profile
21
4
MOVILINK® protocol via RS485 transmission method
Serial Interfaces of MOVIDRIVE® B
4.3.2
Telegrams
Telegram
transmission
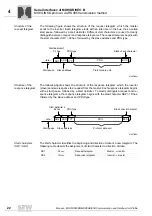
Both cyclic and acyclic data exchange is used in drive engineering. Cyclic telegrams via
the serial interface are mainly used for drive control in automation tasks. In this case,
the master station has to ensure cyclic data exchange.
Cyclical data
exchange
Cyclic data exchange is mainly used for controlling inverters via the serial interface. The
master continuously sends telegrams with setpoints (request telegrams) to an inverter
(slave) and expects a response telegram with actual values from the inverter. Once the
request telegram is sent to an inverter, the master expects the response telegram within
a defined time (response delay time). The inverter will only send a response telegram if
it has correctly received a request telegram with its slave address. During cyclic data
exchange, the inverter monitors data communication and triggers a timeout response if
it has not received another request telegram from the master within a specified time.
MOVILINK
®
allows for performing acyclic service and diagnostic tasks during cyclic
communication without having to change the telegram type.
Acyclical data
exchange
Acyclic data exchange is primarily used for startup and diagnostic purposes. In this
case, the inverter does not monitor the communication connection. In acyclic mode, the
master can send telegrams to the inverter at irregular intervals.
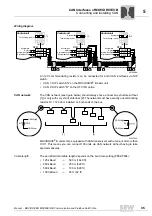
Telegram
structure
Data exchange is carried out with only two telegram types. The master sends a request
with data in the form of a request telegram to the inverter. The inverter responds with a
response telegram. In case of word information (16 bit) within user data, always the high
byte will be sent first followed by the low byte. In case of double-word information (32
bit), always the high byte will be sent first, followed by the low word. The protocol does
not include coding of the user data. The content of user data is explained in detail in the
"SEW unit profile" chapter.
Summary of Contents for MOVIDRIVE MDX60B
Page 2: ...SEW EURODRIVE Driving the world...
Page 142: ......
Page 143: ...SEW EURODRIVE Driving the world...





















































