7. MODBUS
IMS01J02-E2
143
Continued from the previous page.
Name
Attri-
bute
Struc-
ture
Data range
Factory
set value
Positioning adjustment
counter
[H-TIO-K]
R/W
C
0 to 100 *
0
H-CT-A module
heater break alarm status
[H-CT-A]
RO C
0:
Normal
1: Break
2: Welding
H-DI-A module
input status
[H-DI-A]
RO M
The respective channel status is assigned to
each bit in the holding register.
bit 0: CH1 (DI1)
bit 1: CH2 (DI2)
bit 2: CH3 (DI3)
bit 3: CH4 (DI4)
bit 4: CH5 (DI5)
bit 5: CH6 (DI6)
bit 6: CH7 (DI7)
bit 7: CH8 (DI8)
bit 8 to 15: Unused
Bit data 0: OFF 1: ON
[Decimal number: 0 to 255]
Cascade monitor
[H-CIO-A]
RO C
±
Input span
Data will be valid in slave channel
Positioning monitor
[H-TIO-K]
RO C
−
5.0 to
+
105.0 %
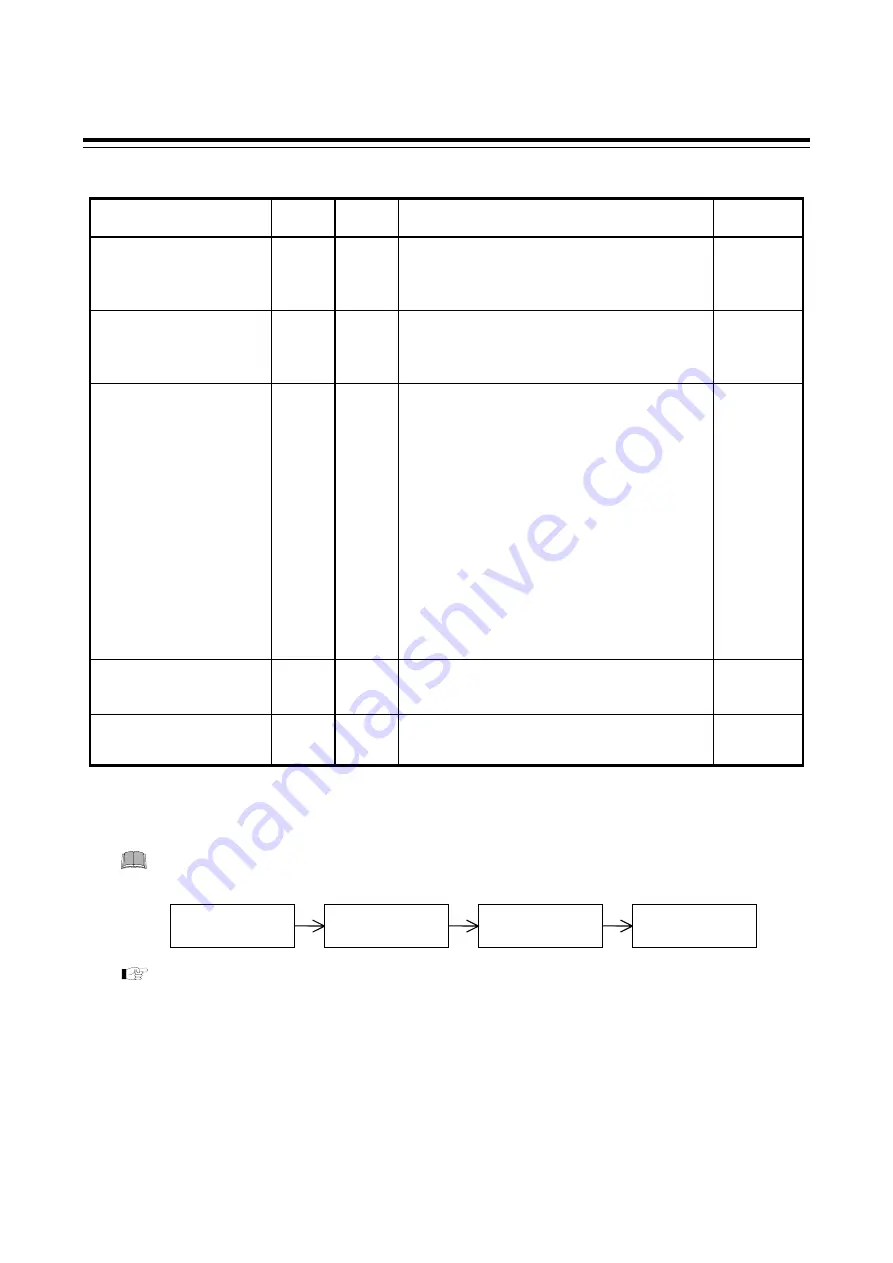
* Positioning adjustment counter
The opening adjustment and the motor time are taken in. When the specified setting counter value is
input, the operations begin. (This is only valid when control is stopped.)
Always adjust the opening first and capture the motor time after the adjustment is
complete.
For details, see the
Positioning adjustment counter (P. 106)
.
Continued on the next page.
Capture the
motor time
Setting to normal
status
FBR opening
adjustment
Motor time
(See P. 132)