





























Programming Your Application
6-41
590 Series DC Digital Converter
I
ntegral (INT. TIME CONST.)
The Integral term is used to give zero steady state error between the setpoint and
feedback values of the PID. If the integral is set to a small value, this will cause an
underdamped or unstable control system.
D
erivative (DERIVATIVE TC)
This is used to correct for certain types of control loop instability, and therefore
improve response. It is sometimes used when heavy or large inertia rolls are being
controlled. The derivative term has an associated filter to suppress high frequency
signals.
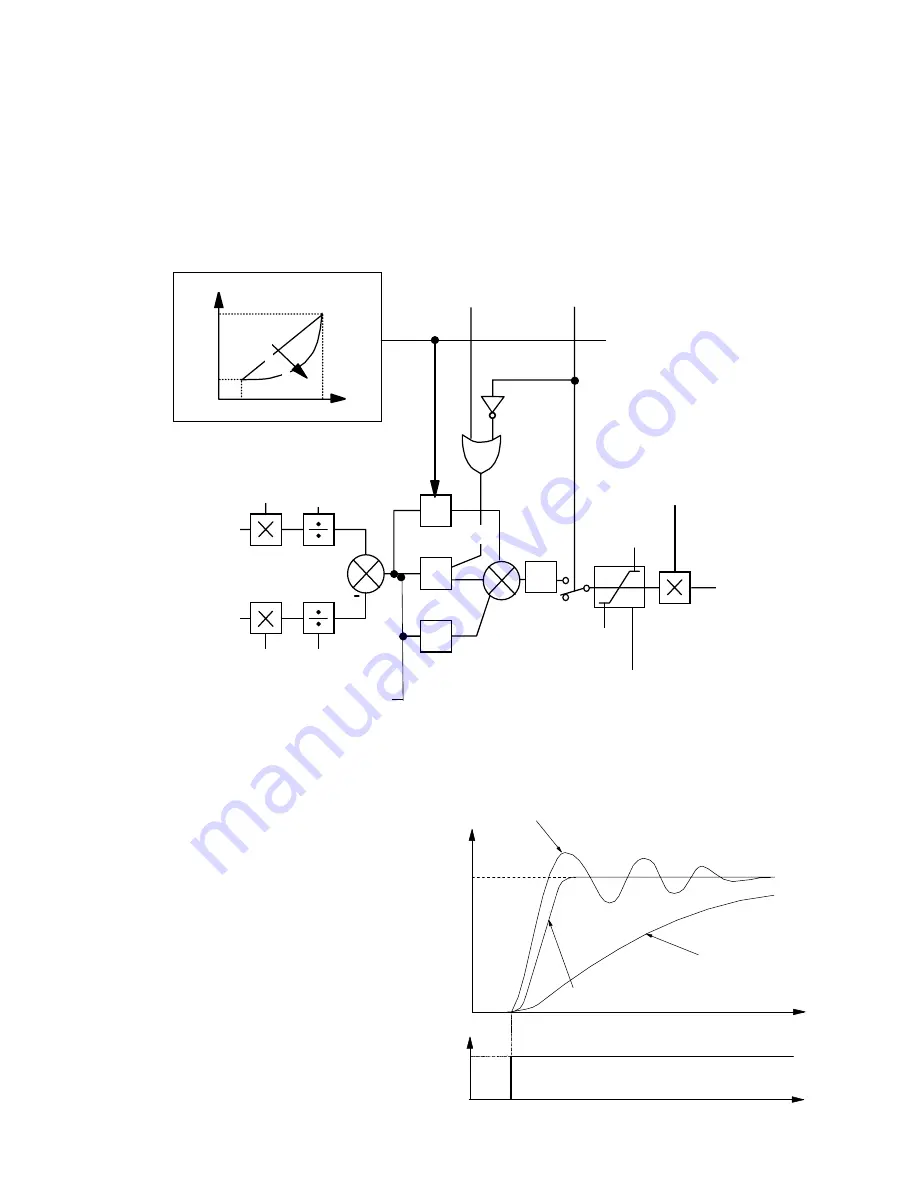
+
Input 1
[410]
Ratio 1
[412]
Divider 1
[418]
Input 2
[411]
Ratio 2
[413]
Divider 2
[414]
F
[403]
D
[401]
I
[402]
P
PID Output
[417]
+
+
+
+
Neg Limit
[406]
Pos limit
[405]
O/P Scaler
(Trim) [407]
PID Error
[415]
Enable
[408]
Integral Defeat
[409]
Reset
Prop
[404]
Pmin
[474]
Dmin
Dmax
Mode
[473]
Mode = 0
1
4
Diam*
PID Gain
Profiled Gain
[475]
Gain Profiler
PID Clamped
[416]
0%
* - Linked internally to Diameter Calculator
You should achieve a
critically damped
response, which allows
the mechanics to track as
precisely as possible a
step change on the
setpoint.
Critically Damped Response
Underdamped
Critically damped
Overdamped
Setpoint
Value
Setpoint
Time
Time
Summary of Contents for 590 series
Page 12: ...605 Frequency Inverter HA389591 Issue 1 Contents Contents Page Cont 12...
Page 16: ...1 4 Getting Started 590 Series Digital Converter...
Page 22: ...2 6...
Page 64: ...3 42 Installing the Converter 590D DC Digital Converter HA467078...
Page 82: ...4 18 Operating the Converter 590 Series DC Digital Converter...
Page 90: ...5 8 The Man Machine Interface MMI 590 Series DC Digital Converter...
Page 168: ...9 6 Control Loops 590 Series DC Digital Converter...
Page 222: ...13 14 Standard and Optional Equipment 590 Series DC Digital Converter...
Page 234: ...15 2 The Default Application 590 Series DC Digital Converter...
Page 242: ......





















































