





























Command Descriptions
221
OUTPA
Output on Position
Type
Output
Syntax
<!>OUTPA<b>,<b>,<r>,<i>
Units
1
st
& 2
nd
b = enable/modal bits;
r = scalable distance
i = time (ms)
Range
1
st
b = 1 (enable output on position) or 0 (disable)
2
nd
b = 1 (incremental position) or 0 (absolute position)
r = -2,147,483,648 to +2,147,483,647
i = 0-65535
Default
0,0,0,0
Response
OUTPA: *OUTPA0,0,+0,0
See Also
ENCCNT, [ OUT ], OUT, OUTFNC, PSET, SFB
Product Rev
GT6K 6.0
GV6K 6.0
Use the
OUTPA
command to configure onboard output #1 (pin #41 on the
DRIVE I/O
connector) to activate
based on the specified position of the axis. The position referenced is dependent upon whether the axis is a
servo or stepper:
•
GV6K Servo
:
The referenced position is the feedback position.
•
GT6K Stepper
: The referenced position depends on the
ENCCNT
setting at the time the
OUTPA
command is executed. If
ENCCNT0
(factory default), the commanded position is used, if
ENCCNT1
,
the encoder position is used.
To use the
OUTPA
command, you must first use the
OUTFNC1-H
command to configure onboard output #1
to function as an
output on position
output. Refer to the programming example below.
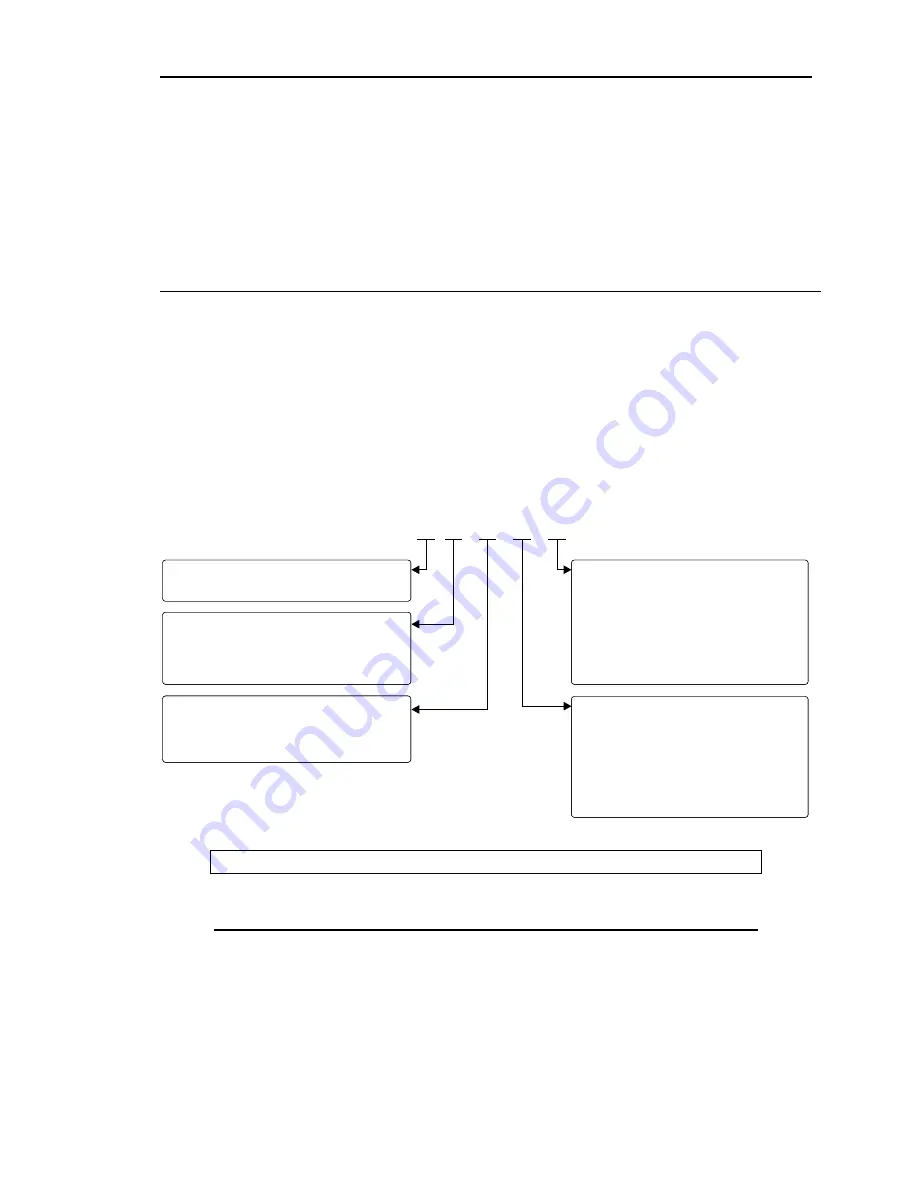
Syntax:
OUTPA <b>
<b>
<r>
<i>
Output Specifier:
Enable Bit:
Incremental or Absolute Position Comparison:
Time (milliseconds):
Position:
Time (milliseconds) the output is to stay active.
The output activates when the specified
position (< r > ) is reached or exceeded, and
stays active for the specified time.
If this field is set to zero, the
output will stay active for as long as the actual
distance equals or exceeds the position
comparison distance (this is possible only for
an absolute position comparison).
A ...
Turn on output 1 based on position
1 ...
Enable the output-on-positon function
0 ...
Disable the output-on-positon function
1 ...
Set position comparison to incremental
(measured from the last start-motion
command, such as
GO
,
GOWHEN
, etc.)
0 ...
Set position comparison to absolute
Servo Axes: If an
SFB
command is executed,
the function is disabled.
Scalable distance (distance is either
incremental or absolute, depending on the
second < b > data field.
Servo Axes:
Only encoder or resolver position can be used.
Stepper Axes:
- If
ENCCNT0
, the commanded position is used.
- If
ENCCNT1
, the encoder position is used.
NOTE
The output activates only during motion; therefore, issuing a
PSET
command to set the
absolute position counter to activate the output on position will not turn on the output until
the next motion occurs.
Example
(servo axes)
:
SFB1
; Select encoder feedback
OUTFNC1-H
; Set onboard output #1 as an "output on position" output
OUTPA1,0,+50000,50
; Turn on onboard output #1 for 50 ms when the encoder
; position is > or = absolute po50,000
www.comoso.com
Summary of Contents for Gemini GV6K
Page 24: ...www comoso com...
Page 40: ...www comoso com...
Page 344: ...www comoso com...
Page 350: ...www comoso com...





















































