



















№
SR-ZSV00039
-
71
-
Motor Business Unit, Appliances Company, Panasonic Corporation
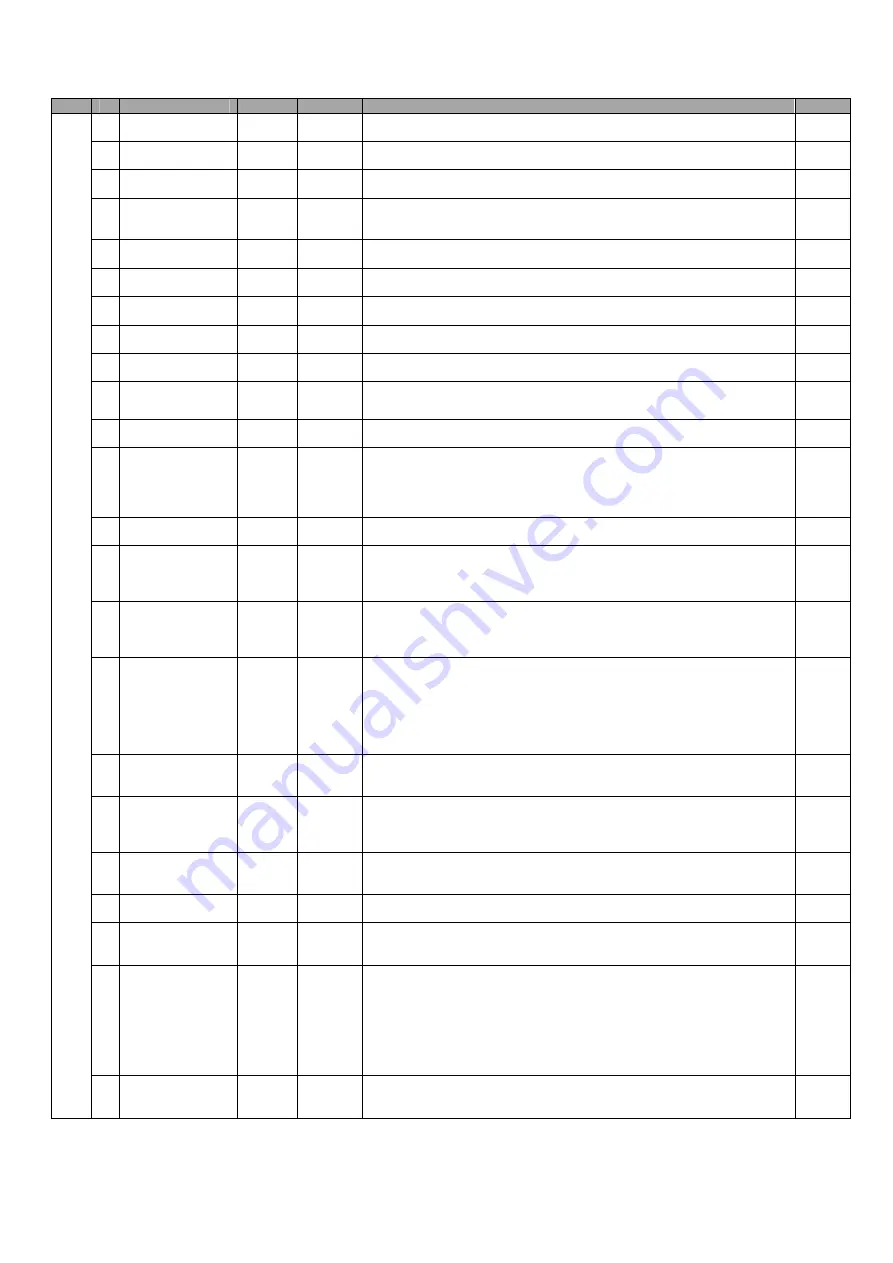
Category 5: Extended configuration
Category No.
Parameter
Unit
Setup range
Function/description
Attribute
5
00
2
nd
numerator of
electronic gear
-
0
2
30
Sets the numerator of the second command division.
Always
valid
01
3
rd
numerator of
electronic gear
-
0
2
30
Sets the numerator of the third command division.
Always
valid
02
4
th
numerator of
electronic gear
-
0
2
30
Sets the numerator of the the fourth command division.
Always
valid
03
Denominator of
pulse output division
-
0
262144
Set this when the output pulse counts per one motor revolution should be determined
based on the ratio of the numerator to the denominator of the division.
Power
reset
04
Over-travel inhibit
input setup
-
0
2
Sets the operation of the positive/negative drive prohibition inputs.
Power
reset
05
Sequence at
over-travel inhibit
-
0
2
Sets the sequence during drive prohibition input.
Power
reset
06
Sequence at
Servo-Off
-
0
9
Sets the sequence at servo-off.
Always
valid
07
Sequence at main
power OFF
-
0
9
Sets the sequence at main power OFF
Always
valid
10
Sequence at alarm
-
0
7
To set the sequence at alarm .
Always
valid
11
Torque setup for
emergency stop
%
0
500
To set the torque limit at the immediate stop.
When the setting value = 0, the torque limit during normal operation is applied.
Always
valid
12
Over-load level
setup
%
0
500
Sets the overload level. If set to 0, the value is 115%.
Also, the internal values are limited by 115%.
Always
valid
13
Over-speed level
setup
r/min
0
20000
Sets the detection level for Err26.0 “Over-speed protection”. If set to 0, the value is
the maximum number of motor rotation multiplied by 1.2.
Also, the internal values are limited by the maximum number of motor rotation
multiplied by 1.2.
Always
valid
14
Motor working range
setup
0.1 revolu-
tion
0
1000
To set the maximum travel distance of the motor in addition to the position command.
Always
valid
15
I/F reading filter
-
0
3
Selects the signal read cycle for control input.
0:0.166ms,1:0.333ms,2:1ms,3:1.666ms
However, the deviation counter clear input (CL) and command pulse prohibition input
(INH) are excluded.
Power
reset
16
Alarm clear input
setup
-
0
1
Selects the recognition time for the alarm clear input (A-CLR).
0:120ms
1: As per Pr5.15 “I/F reading filter”.
Power
reset
17
Counter clear input
mode
-
0
4
Selects the reception condition for the counter clear input signal.
0: Disabled
1: Clear by level (without reading filter)
2: Clear by level (with reading filter)
3: Clear by edge (without reading filter)
4: Clear by edge (with reading filter)
Always
valid
18
Invalidation of
command pulse
inhibit input
-
0
1
Enables/disables the command pulse prohibition input (INH).
0: Enabled 1: Disabled
Always
valid
19
Command pulse
inhibit input reading
setup
-
0
4
Selects the signal read cycle for the command pulse prohibition input (INH).
0:0.166ms,1:0.333ms,2:1ms,3:1.666ms,
4: No read filter
Power
reset
20
Position setup unit
select
-
0
1
To define the unit for the in-position range and the Position deviation excess
protection .
0: Per command
1: Per encoder
Power
reset
21
Selection of torque
limit
-
0
6
To define the mode to select positive/negative torque limits.
Always
valid
22
2
nd
torque limit
%
0
500
To set the 2
nd
torque limit for the motor output torque.
Also, parameter value is limited by the maximum torque of the motor used.
Always
valid
32
Command pulse
input maximum
setup
Kpulse/s
250
4000
Set the maximum number of command pulse inputs to be used. If the command
pulse input frequency exceeds this range, Err27.0 “Command pulse input frequency
error protection” will occur.
Note) Detection of the command pulse input frequency error is performed against the
pulses received by the drive. If the pulse frequency input significantly exceeds this
set value, detection may not work correctly.
Power
reset
33
Pulse regenerative
output limit setup
-
0
1
Enables/disables the detection of Err28.0 “Limit of pulse replay error protection”.
0: Invalid 1: Valid
Power
reset







































































