





























№
SR-ZSV00039
-
53
-
Motor Business Unit, Appliances Company, Panasonic Corporation
6
-
4
Setting of Sequence Movements
A series of actions can be defined for various operation states.
6
-
4
-
1
Drive prohibition input (POT , NOT ) sequence
The following shows how to prescribe actions taken after an overtravel limit (POT or NOT) is entered.
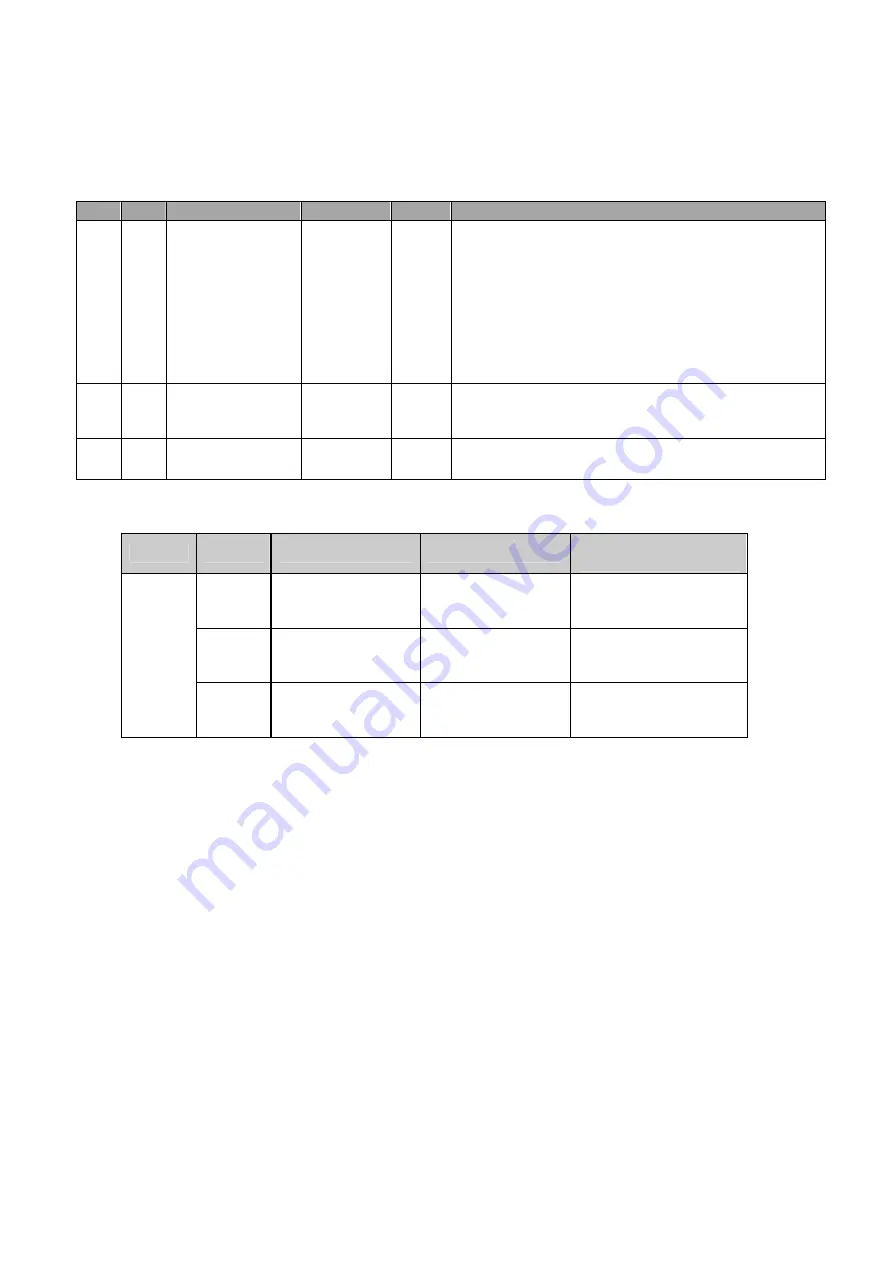
(1) Related parameters
Category
No.
Parameter
Setup range
Unit
Function
5
04
Over-travel inhibit
input setup
0
~
2
-
Specify drive prohibition input (POT, NOT) input operations.
0: POT
Normal direction drive prohibited, NOT
Functions as
reverse direction drive prohibition. If POT is input during
normal direction operation, the system halts in accordance with
Pr5.05 “Sequence at over-travel inhibit”. For Reverse direction,
the system performs the same operation when NOT is input.
1: POT , NOT is invalid and has no effect on operations.
2: Inputting either POT or NOT activates Err38.0 “Over-travel
inhibit input protection”.
5
05
Sequence at over-travel
inhibit
0
~
2
-
If Pr5.04 “Over-travel inhibit input setup”= 0, specify status during
slowdown and after halting after inputting drive prohibition input
(POT, NOT).
5
11
Torque setup for
emergency stop
0
~
500
%
To set a torque limit for the immediate stop.
(2) Item
• Details of Pr5.05 “Sequence at over-travel inhibit”
Pr5.04
Pr5.05
During deceleration
*6
After stop
Position deviation/extern
al scale deviation
0
Dynamic brake
applied
For the overtravel
direction, torque
command =0
Retained *2
1
For the overtravel
direction, torque
command =0
For the overtravel
direction, torque
command =0
Retained *2
0
2
Immediate stop
*5
For the overtravel
direction, command
=0 *1
Cleared before and after
the deceleration *3
*1 the position command = 0 is srv-lock
*2 If commands keep coming for the overtravel direction with the overtravel limit on, the position deviations may
accumulate to result in Err24.0 “Position deviation excess protection”. In case an overtravel limit is turned on, stop
commands for the overtravel direction.
*3 Position deviations/external scale deviations are cleared twice at the start and end of the deceleration; therefore, it is necessary
to execute an homing operation to return to origin if the position is being controlled.
*4 f a setting value for Pr5.04 “Over-travel inhibit input setup” is “2,” Err38.0 “Over-travel inhibit input protection” is
activates when either POT or NOT is turned on. Therefore, the system operates in accordance with
Pr5.10”Sequence
at alarm”, not with this setting value. If other types of errors occur also, Pr5.10 “Sequence at alarm” takes
precedence.
*5 “Immediate stop” refers to the control to stop immediately with the servo control on.
Torque command values for that case are restricted by Pr5.11 “Torque setup for emergency stop”.
Because instantaneous stopping slows down a motor suddenly, position deviation of position control becomes larger
instantaneously, and it may cause Err24.0 “Position deviation excess protection” or Err34.0 “Software limit
protection”. In that case, specify appropriate values for Pr0.14 “Position deviation excess setup” and Pr5.14 “Motor
working range setup”.
*6 “During deceleration” refers to the section from the state where the motor is operating until the speed is reduced to 30
r/min or below. Once the speed reduction achieves 30 r/min and thus it transfers to the “After stop” state, the
post-stop actions will be performed regardless of the motor speed.







































































