



















№
SR-ZSV00039
-
1
-
Motor Business Unit, Appliances Company, Panasonic Corporation
1
.
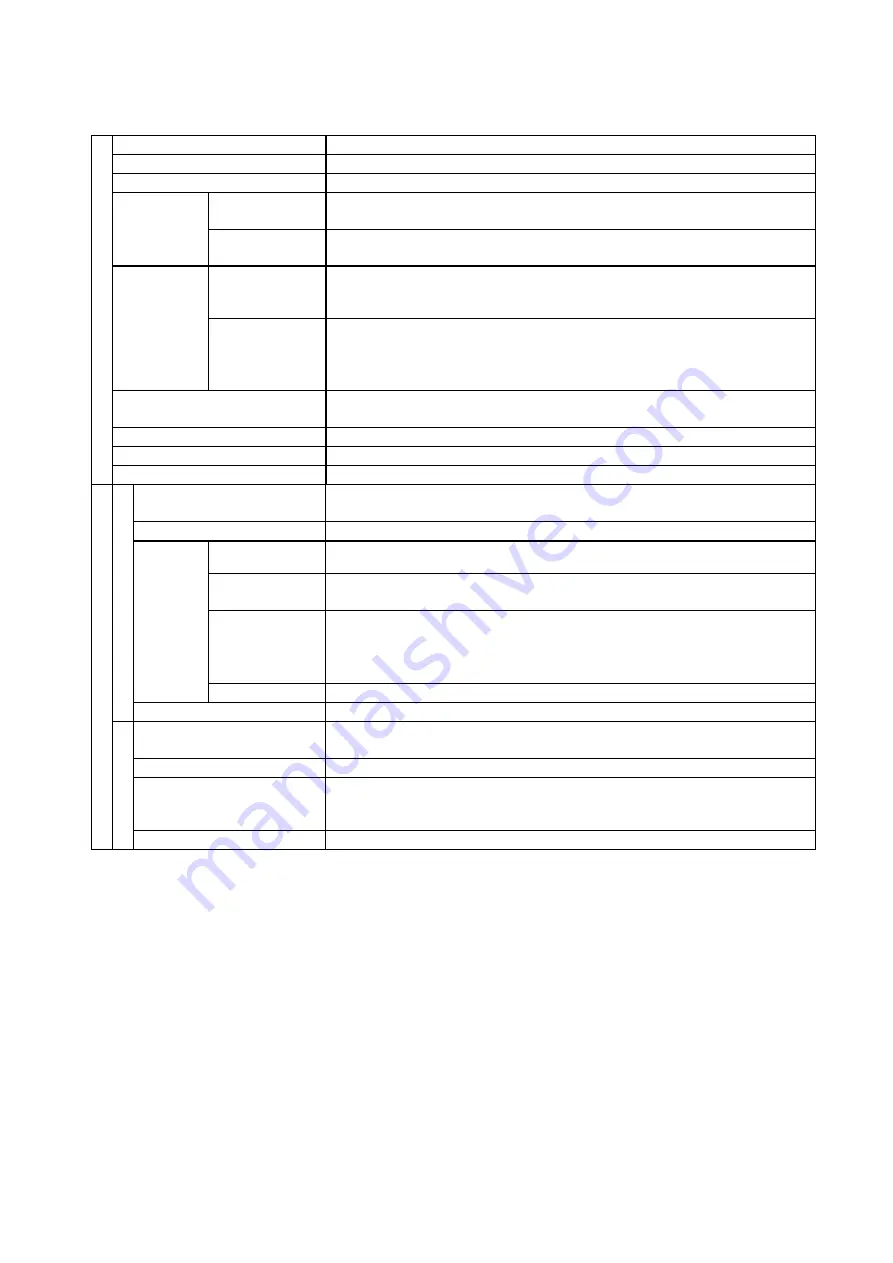
Specification Overview
Control method
IGBT PWM method sine wave drive
Control mode
Position Control
Encoder feedback
2500p/r
(resolution:
10
,
000
) 5-wire serial incremental encoder
Input
6
multi-function inputs
Functions of multi-function inputs: parameter-selectable
Control signal
output
3
multi-function outputs
Functions of multi-function outputs: parameter-selectable
Input
1
inputs each
Both line driver interface and open collector interface supported using optocouple
r input
Pulse signal
output
4 outputs each
Encoder pulses (phase A, B and Z signals) or external scale pulses (phase EXA, EXB and
EXZ signals) output by line driver. Open collector output is also available for phase Z
and EXZ signals.
Communication function(USB)
Personal computer, etc. can be connected for parameter setting configuration and status
monitoring.
Front panel
①7 seg LED
2pcs
②
RSW
1pcs
Regeneration
E
xternal resistor
Basic
Spe
cifi
cati
on
Dynamic brake
Provided
Control input
Deviation counter clear, command pulse input inhibition, electronic gear switching,
damping control switching, etc.
Control output
In-position, etc.
Maximum command
pulse frequency
500 kpps
Input pulse train
Differential input; parameter-selectable (1) Positive/Negative 2) Phase A/Phase B 3)
Command/Direction)
Command scaling
(electric gear ratio
setting)
1/1000 - thousandfold
Encoder resolution (numerator) and command pulse count per motor revolution (de-
nominator) can be arbitrarily specified between 1-2
20
for numerator and 1-2
20
for de-
nominator but use within the range above.
Input pulse
Smoothing filter
Selectable between first order filter and FIR filter for command input.
P
os
it
ion
c
o
nt
rol
D
amping control
Available
Auto tuning
Identifying load inertia real-time and automatically setting gain that meets set stiffness
when the motor is driving by a operation command from the host or drive
Dividing encoder pulse
Pulse count can be arbitrarily specified (up to encoder pulse count).
Protective function
Overvoltage, undervoltage, overspeed, overload, overheat, overcurrent,
encoder abnormalities
Position deviation fault, Command pulse division, EEPROM error, etc.
F
unc
ti
o
n
C
o
m
m
o
n
Alarm data trace back function
Alarm data history can be viewed.







































































