





























№
SR-ZSV00039
-
44
-
Motor Business Unit, Appliances Company, Panasonic Corporation
5
-
2
-
5
Feed Forward Function
Position deviation can be reduced and response can be improved in comparison with controlling by
feedback only, but also using the velocity feed forward function, which calculates speed control command
required for operations on the basis of internal position command and adds the calculation to speed control,
which is calculated by comparison with position feedback.
The torque feed forward function, which calculates torque command required for operations on the basis of
speed control command and adds the calculation to torque command calculated by comparison with speed
feedback, improves responses of the speed control system.
1
)
Related parameters
using two feed forward functions, velocity feed forward and torque feed forward
Category
No.
Parameter
Setup range
Unit
Function
1
10
Velocity feed forward
gain
0
1000
0.1%
This adds a value, which is obtained by multiplying a speed
control command calculated on the basis of internal position
command with a ratio of this parameter, to a speed command
from position control process.
1
11
Velocity feed forward
filter
0
6400
0.01 ms
A time constant of primary delay filter is specified for inputting to
velocity feed forward.
1
12
Torque feed forward
gain
0
1000
0.1%
This adds a value, which is obtained by multiplying a torque
command calculated on the basis of speed control command
with a ratio of this parameter, to a torque command from speed
control process.
1
13
Torque feed forward
filter
0
6400
0.01 ms
A time constant of primary delay filter is specified for inputting to
torque feed forward.
2
)
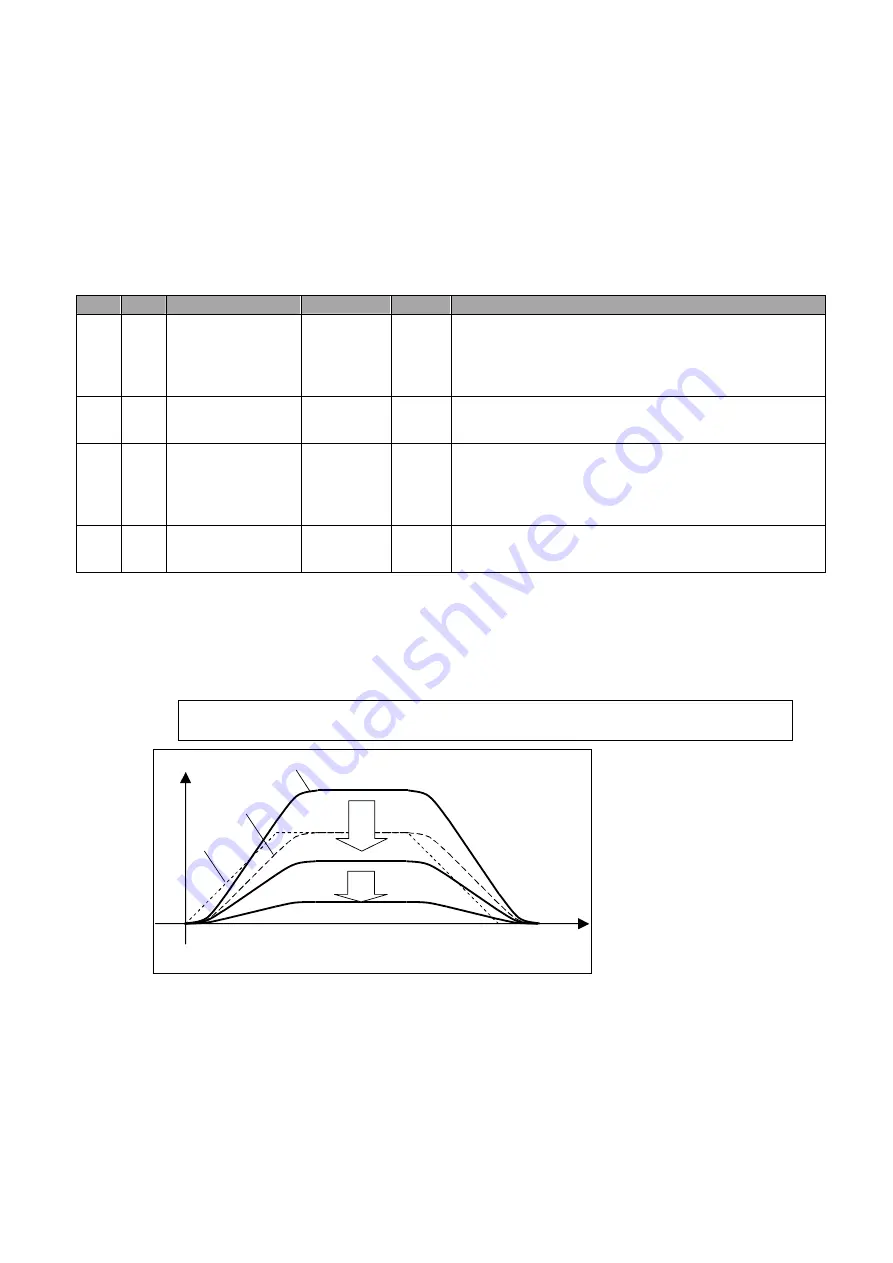
Example of using velocity feed forward
Velocity feed forward is made valid by gradually increasing velocity feed forward gain with velocity
feed forward filter specified at approximately 50 (0.5 ms). Position deviation during operation at a
constant speed becomes smaller as expressed by the following equation, in accordance with a value of
velocity feed forward gain.
Position deviation [Command unit] =
Command speed [Command unit/s]/position loop gain
[1/s]
(100 - velocity feed forward gain [%]) / 100
Command speed
Motor speed
Position deviation
Position deviation at a constant speed becomes smaller as a value of speed feed forward gain is increased.
Speed FF gain
50[%]
80[%]
0[%]
Time
If a gain is specified as 100 [%], position deviation theoretically becomes “0.” However, this causes significant
overshoot in acceleration and deceleration.
If an updating cycle of position command input is longer than a control cycle of drive, or if pulse fre-
quencies are uneven, operating noise may be louder when velocity feed forward is valid. In that case,
use position command filter (Primary delay/FIR smoothing) of specify a higher value for velocity feed
forward filter.
3
)
Example of using torque feed forward
To use torque feed forward, inertia ratio must be specified correctly. Use an estimated value used for operation of
real-time auto tuning again, or specify an inertia ratio calculated on the basis of machine specifications for Pr0.04 “Inertia
ratio.”
Torque feed forward is made valid by gradually increasing torque feed forward gain with torque feed forward filter







































































