





























Drive profile
62
3 E
therC
Bit 13
Bit 12
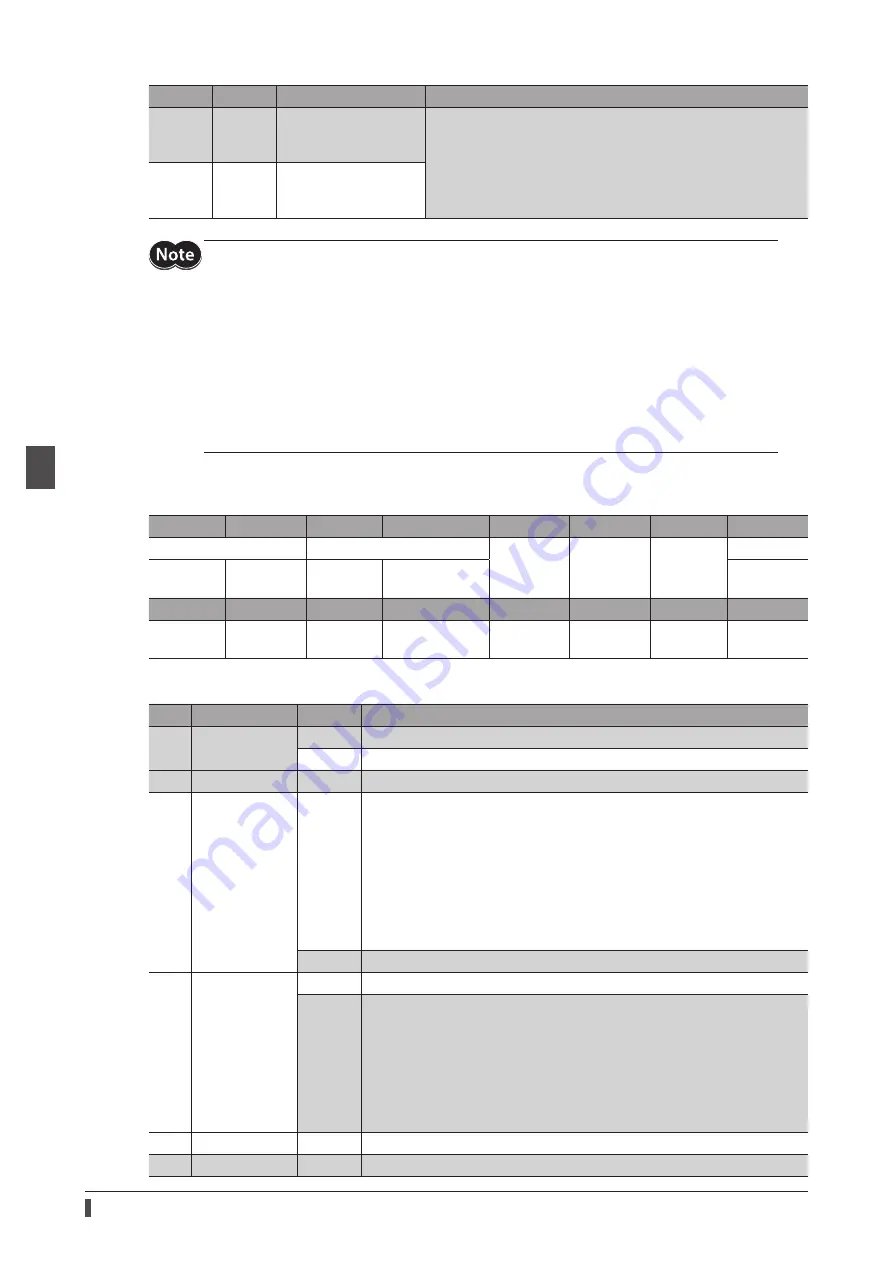
Operation mode
Description
1
0
Continuous operation
(push-motion) *
Performs continuous operation at the Target velocity (60FFh).
When a mechanism installed to the motor presses against a load,
pressure is continuously applied to the load.
In the Cyclic synchronous velocity mode, the movement is the
same between continuous operation (push-motion) and
continuous operation (torque control).
1
1
Continuous operation
(torque control) *
*When continuous operation (push-motion) or continuous operation (torque control) is performed,
note the following.
•
When a mechanism installed to the motor pressed against a load, push-motion operation is
performed while a position deviation of 2.7° generates. Since an alarm of Overload may be
generated if the operation is stopped in this state, perform operation to return the actual position
by 3.6° before push-motion operation is stopped.
•
Do not perform push-motion operation with geared motors and the
DGII
Series. Doing so may
cause damage to the motor or gear part.
•
When push-motion operation is stopped in a state where a load is pressed, set the Operating
current (4120h) of the next operation to be executed, to a value in the Push current (4121h) or less.
If a higher current value than the Push current (4121h) is set, the push current may increase when
the operation transitions, causing an unexpected push force to apply.
Statusword of Cyclic synchronous velocity mode
Bit 15
Bit 14
Bit 13
Bit 12
Bit 11
Bit 10
Bit 9
Bit 8
Manufacturer specific
Operation mode specific
Internal
limit active
Reserved
Remote
ms
TLC
−
Reserved
Target velocity
ignored
−
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Warning
Switch on
disabled
Quick stop Voltage enabled
Fault
Operation
enabled
Switched
on
Ready to
switch on
Details of Statusword
Bit
Name
Value
Description
15
TLC
0
A load does not reach the upper limit of the motor output torque.
1
A load reached the upper limit of the motor output torque.
13
Reserved
0
Reserved
12
Target velocity
ignored
0
The target velocity command is disabled.
When the state is any of the followings, the value changes to 0 and the Target
velocity is disabled.
•
The drive state machine is other than "Operation enabled."
•
The motor is in a non-excitation state.
•
The Halt (6040h: Bit 8) has been set to 1.
•
The STOP input is being ON.
•
The internal limit is in an active state.
1
The target velocity command is enabled.
11
Internal limit
active
0
The function limitation by the internal limit is not in an active state.
1
The function limitation by the internal limit became an active state.
The value changes to 1 when any of the following internal limit functions is
being activated.
•
Limit sensor (FW-LS/RV-LS)
•
Operation prohibition input (FW-BLK/RV-BLK)
•
Software limit
•
Mechanism limit
10
Reserved
0
Reserved
9
Remote
1
The value changes to 1 when the initialization is completed.
Summary of Contents for aSTEP AZ mini Driver
Page 14: ...14 1 Introduction...
Page 128: ...128 3 EtherCAT communication...
Page 146: ...146 4 Object list...
Page 164: ...164 5 Troubleshooting...
Page 170: ...170 6 Reference materials...
Page 171: ...171 6 Reference materials...







































































