




















- 1 -
1.
Outline
MR210AU/220AU is a motion control unit which can control one or two axes of either stepper motor or pulse type servo drives
for position and speed controls. A built-in EEPROM can program driving parameter values and position data of up to 64 steps for
each axis. MR210AU controls 1-axis and MR220AU controls 2-axes.
Model
Axes
Serial Communication Port
MR210AU
1
equipped with RS-232C, USB.
MR220AU
2
equipped with RS-232C, USB.
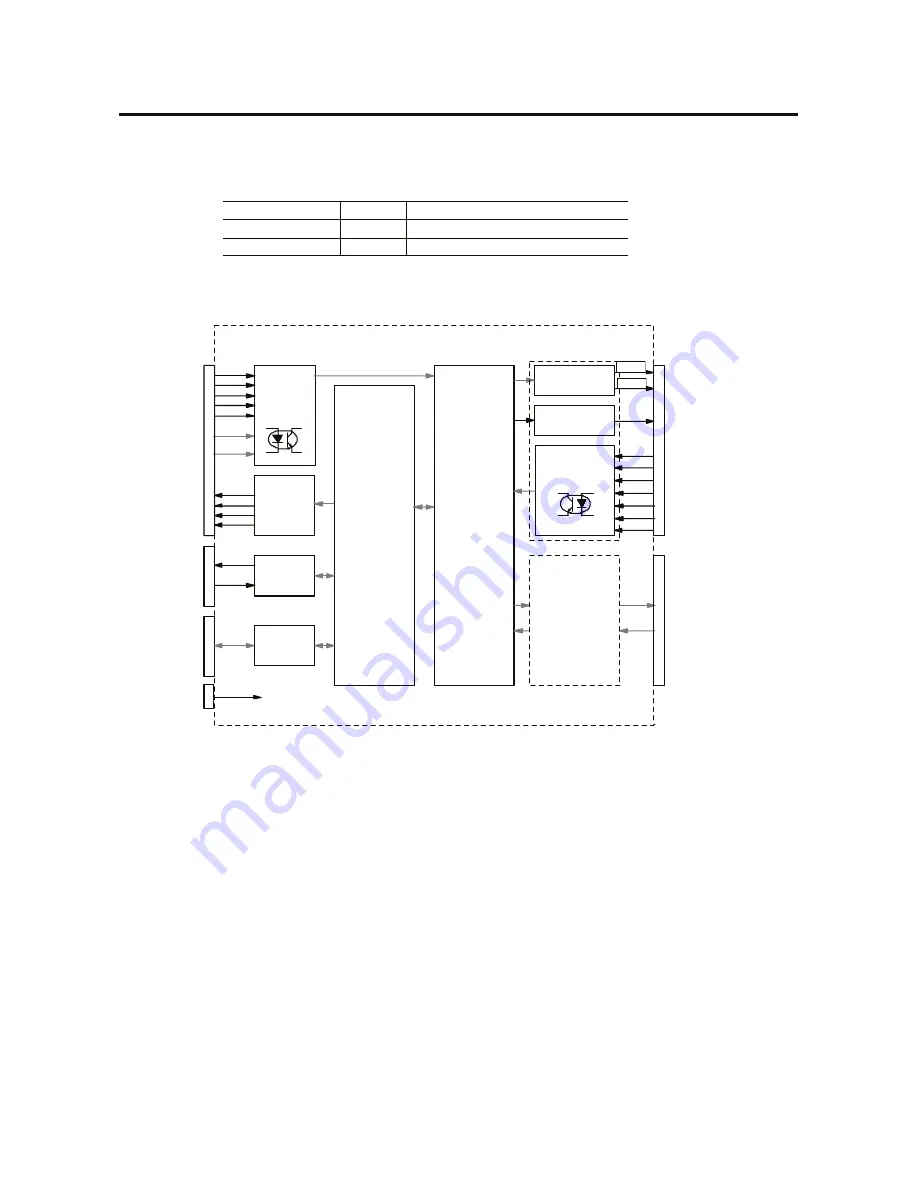
Fig.1.1 shows the MR210AU/220AU basic circuit block diagram.
A 2-axes motion control IC “MCX302” is equipped with acceleration/deceleration drive pulse oscillation of up to 4MHz and a
position counter.
Driving pulse output to a motor driver is differential line-drive output, which can connect to the motor driver of either photo
coupler input or differential line receiver input.
Sensor input is insulated by photo coupler, which can input over run limits, a home, an in-position and alarm signal from a servo
motor driver.
Serial communication port has two interfaces, RS232C and USB. Connect the serial communication port and PC or a remote box
(option), then set data such as driving parameter mode, position data and program data. In addition, serial communication
commands are prepared so that the user can freely control the axis by programming on Windows.
Parallel interface port performs actual drive activation, stop, position and program selection, which connects to a PLC or switches.
Singl e Chip
Microcomputer
L in e- Dr iver
AM26C31
O utp ut Buffer
TD62083A
Photo Cou pler
X- Ax is I/ F
Y-Axis I/F
DC 2 4V
P o we r
Fig.1.1 MR210AU/220AU Circuit Block Diagram
T89C51ED2
Photo
Output Buffer
TD62083A
+ D ir e ct i on
- D ir e ct i on
Ge n er a l Ou t pu t
+ D ir e ct io n L i mi t
- D i re c ti on Li m it
S e rv o P o si ti o ni n g
Se rv o A l er m
En c od e r Z- P ha s e
H o me
Ne a r Ho m e
MAX232C
P ar a ll e l
I/ F
I/ F
RS -2 3 2C
MCX302
X OU T0
XL MT +
XL M T-
X S TO P 0
XS TO P 1
XS TO P 2
X I NP O S
X A LA RM
T X
R X
RE SE T
HO M E
S TR O BE
X
Y
R EG 0 ~ 5
M OD E0 ~ 1
X D RI V E
Y D RI V E
CN1
CN2
CN3
O pen
CN4
Y - Ax i s I/ O S i gn a l
( Sa me as X- A xi s)
2-Ax es Motion
Control IC
TLP281
Co llector
XE R RO R
YE R RO R
EEPROM
FT
232
R
CN6
U S B I/ F
TLP281
CN5
[Note1] MR210AU does not have CN5.
N o te 1
注1
XP + P/ N
X P- P /N
Built-in
Cou pler
I n p u t
P u l s e O u t p u t
P u l s e O u t p u t
C om p le ti o n







































































