





























Manual PD4-C (USB)
9 Operating modes
Version: 1.4.1 / 22.07.2016 / FIR-v1626
51
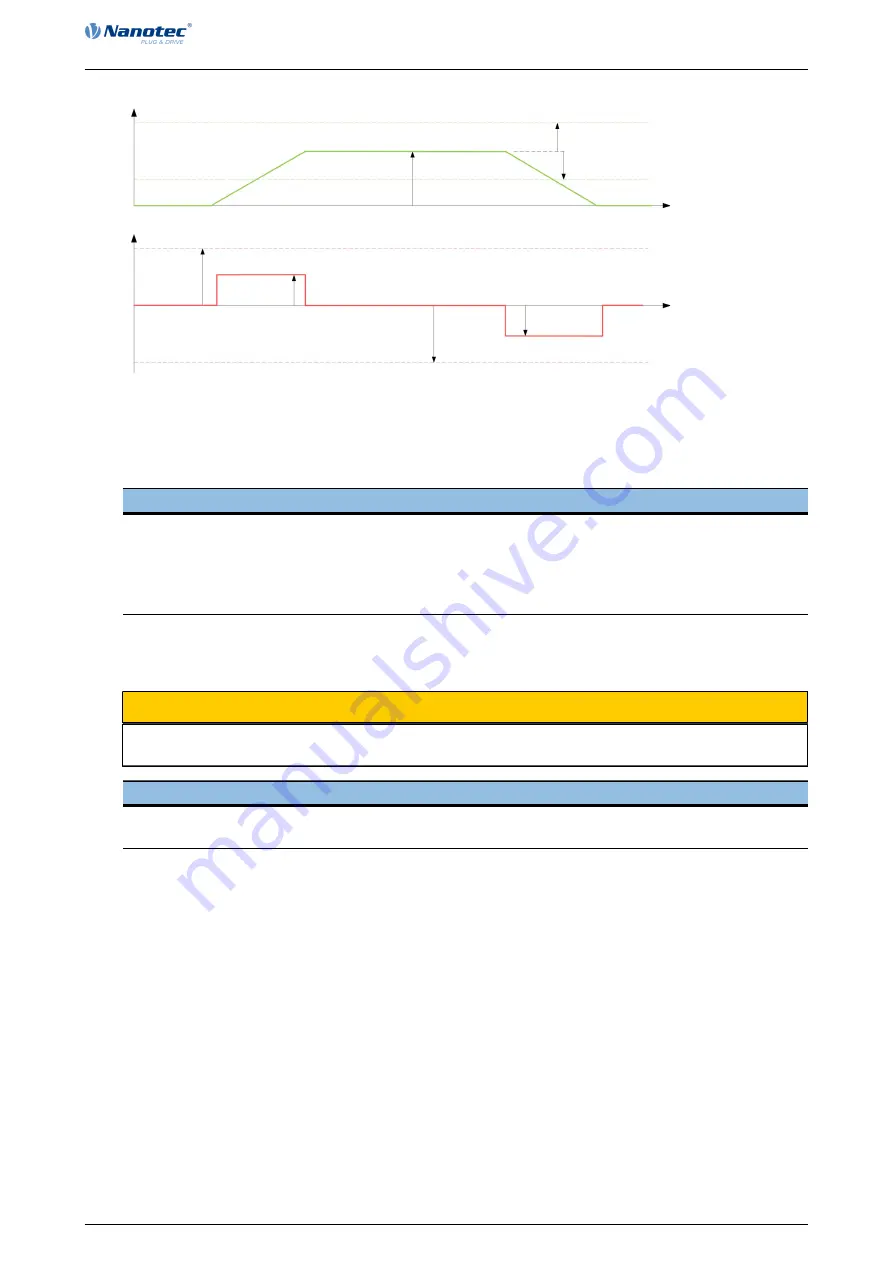
A
cce
le
ra
ti
o
n
S
p
e
e
d
Profile velocity (60FF
h
)
Max. acceleration (60C5
h
)
Max. deceleration (60C6
h
)
Profile acceleration (6083
h
)
Profile deceleration (6084
h
)
Velocity window (606D
h
)
Velocity window (606D
h
)
t
t
9.4 Profile Torque
9.4.1 Special feature PD4C USB
Note
Because this motor controller is not fitted with a field bus, the following operating mode is only usable
with a NanoJ program.
Further information on programming and use of a NanoJ program can be found in the "Programming
with NanoJ" section.
9.4.2 Description
In this mode, the torque is specified as the set point and is moved to via a ramp function.
CAUTION
This mode works in Closed-Loop only. Run over the index of the encoder at minimum once before
using this function. Otherwise a switch to the state "Operational Enabled" is not possible.
Note
The limit switches - and therefore the tolerance bands - are active in this mode. See chapter
"Tolerance bands of the limit switches" for further information about the limit switches.
9.4.3 Activation
To activate the mode, the value "4" must be set in object 6060
h
(Modes Of Operation) (see "DS402
9.4.4 Control word
The following bits in object 6040
(control word) have a special function:
•
Bit 8 (Stop): If this bit is set to "0", the motor is started according to the specifications. When set to
"1", the motor is brought to idling according to the specified values.
9.4.5 Status word
The following bits in object 6041
(status word) have a special function:
•
Bit 10 (Target Reached): This bit in combination with bit 8 of object 6040
h
(control word) indicates
whether or not the specified torque has been reached (see the following table).





















































