





























50
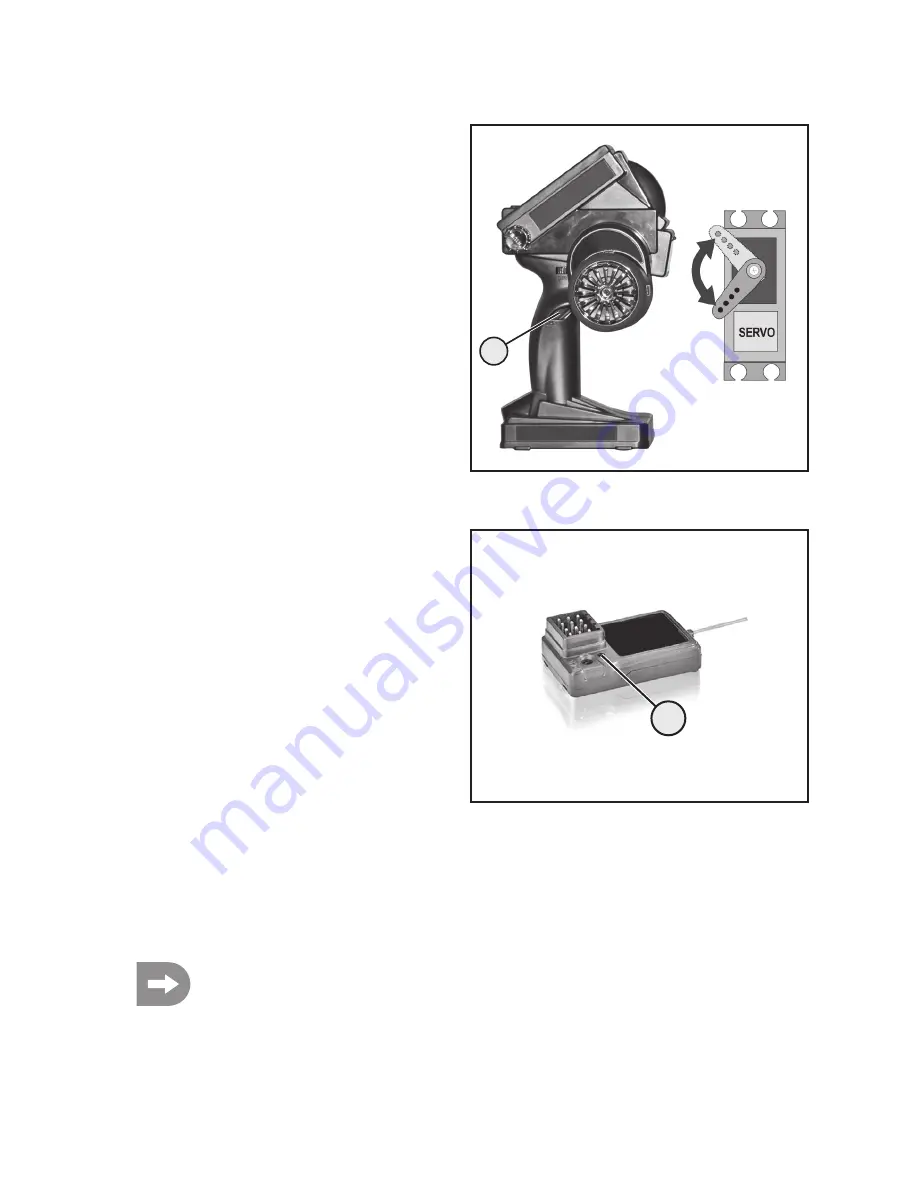
c) Checking the switching function
If you operate the “CH3” button (4) for Channel 3, the
servo connected to the receiver outlet 3 (CH3) must
move from one end point to the other end point.
The appropriate rotation direction and angle can be set
individually later when programming the remote control.
d) Fail Safe function
The receiver has a fail-safe function integrated for the
throttle servo (CH2). At a reception loss at the receiver,
move the throttle servo or a connected speed control-
ler to a programmable position. In a carburettor model,
preferably the brake or at least an idle speed is pro-
grammed. The position „motor off“ is programmed in an
electrical model.
Transmitter and receiver must be activated for program-
ming. Now put the throttle lever at the transmitter in the
position that is to be taken by the servo/speed controller
when reception is lost. Now push the button in the recei-
ver (1) with the pen connected to the programming plug.
The LED flashes briefly. When the LED remains perma-
nently lit again, the failsafe position is programmed and
you can remove the pen from the receiver again.
Test the programing that has just been performed and
the desired effect by deactivating the transmitter when driving forward. The throttle servo or speed controller is to
prevent further driving now.
Note:
The programmed failsafe position of the servo or speed controller is automatically terminated after about 30 seconds.
The servo / speed controller is returned to the neutral position.
When using an accelerator servo, you can accelerate with the combustion motor at a standstill and then
switch the transmitter off. The accelerator servo must then enter the Fail Safe position immediately. When
using an electric model with electronic drive regulator, place the vehicle on a block so that the wheels are
able to rotate freely for the purpose of the test.
4
Figure 11
1
Figure 12
Summary of Contents for GT3.2
Page 122: ...122 ...
Page 123: ...123 ...







































































