





























190
3 PARAMETERS FOR POSITIONING CONTROL
3.6 External Signal Parameter
Contact
Set the signal contact used as the external signal.
■
Normal open
■
Normal close
Precision
Set the precision when the DOG signal is used for the count method home position return or the speed-position switching
control.
*1 When an actual device with the inter-module synchronization setting is used, the inter-module synchronization cycle is used.
*2 When the function is not enabled, a moderate error (error code: 30D2H) occurs.
*3 Detection precision of the high precision setting of the bit device
External signal
Details
FLS signal ON
The upper stroke limit is detected, and "operation of direction that the feed current value increase" cannot be executed.
RLS signal ON
The lower stroke limit is detected, and "operation of direction that the feed current value decrease" cannot be
executed.
STOP signal ON
The stop signal is detected, and an operation stops.
DOG signal ON
The proximity dog/speed-position switching signal is detected, and the home position return operation and speed-
position control switching is executed.
External signal
Details
FLS signal OFF
The upper stroke limit is detected, and "operation of direction that the feed current value increase" cannot be executed.
RLS signal OFF
The lower stroke limit is detected, and "operation of direction that the feed current value decrease" cannot be
executed.
STOP signal OFF
The stop signal is detected, and an operation stops.
DOG signal OFF
The proximity dog/speed-position switching signal is detected, and the home position return operation and speed-
position control switching is executed.
CAUTION
• For the stroke limit wiring, always use negative logic (normally closed contact). Using the positive logic (normally open contact) may cause serious accidents.
• The input signal of the servo amplifier is always turned OFF when the communication with the servo amplifier is disconnected. If using the state of the
external signal of the disconnected axis ([St.1071] External signals FLS (R: 32n/Q: M2411+20n) / [St.1072] External signals RLS (R: 32n/
Q: M2412+20n) / [St.1074] External signals DOG/CHANGE (R: 32n/Q: M2414+20n)) as the external signal of another axis that is not disconnected,
design the system so that the machine will not go into a dangerous state due to the connection state of the servo amplifier.
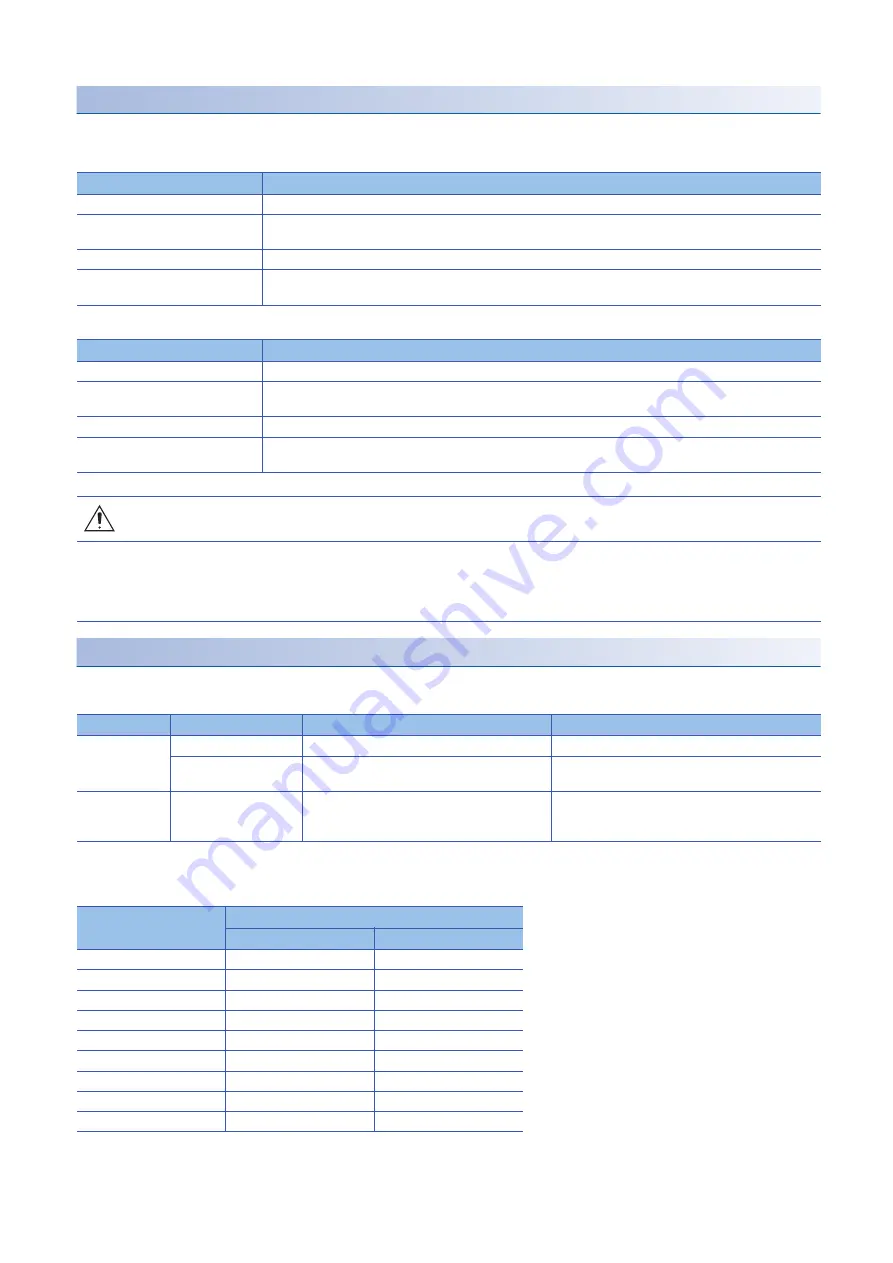
Precision
Signal type
Setting required on the module side
Detection precision [
μ
s]
General
Bit device
None
222
Amplifier input (DI3)
None
• Operation cycle 1.777 [ms] or less: Operation cycle
• Operation cycle 3.555 [ms] or more: 3555
High precision
Bit device
(Actual X device)
• Enable the inter-module synchronization
function.
• Set the input response time.
Input response time
[ms]
Detection precision
Theoretical value [
μ
s]
Measured value [
μ
s]
0.10
4.9
7
0.20
9.9
12
0.40
19.8
22
0.60
25.0
27
1.00
39.5
41
5.00
158
160
10.00
316
318
20.00
630
632
70.00
2500
2502
Summary of Contents for MELSEC iQ-R16MTCPU
Page 2: ......
Page 477: ...APPENDICES Appendix 1 Processing Times of the Motion CPU 475 A MEMO ...
Page 481: ......







































































