





























APPENDICES
APP
−
14
(4) Errors occurring at current value changes and speed changes (300 to 399)
The errors shown in this section are those that occur on execution of current
value changes and speed changes.
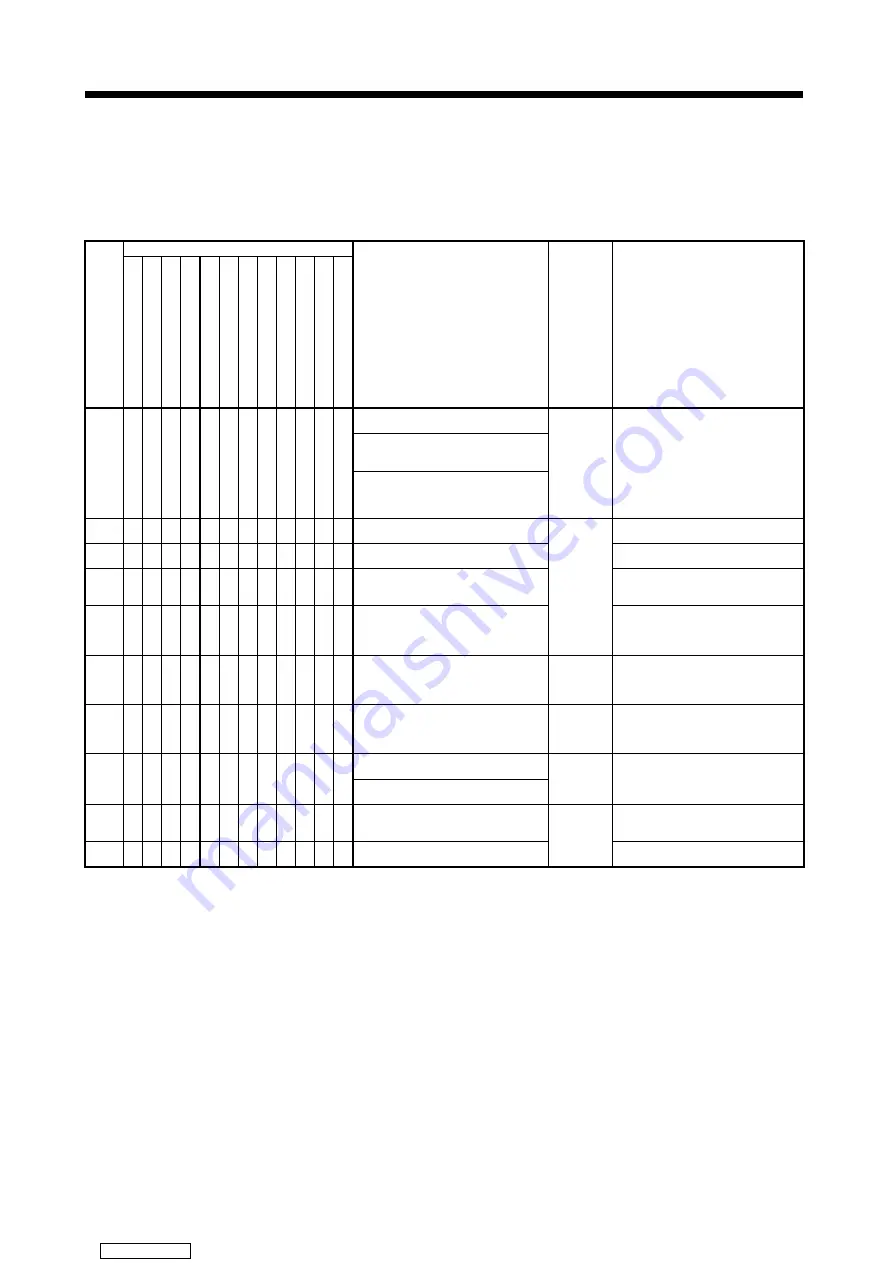
Error codes, causes, processing, and corrective actions are shown in table 2.8.
Table 2.8 List of Errors that Occur at Current Value/Speed Changes
Control Mode
Error
Code
Po
s
it
io
n
in
g
Fi
x
e
d-P
itc
h
Fe
e
d
S
p
eed
S
p
eed
/P
o
s
itio
n
S
witch
in
g
S
p
eed
S
witch
in
g
C
o
ns
ta
nt
Sp
e
e
d
JOG
M
a
n
u
a
l P
u
lse Gen
e
ra
to
r
Ze
ro
in
g
P
o
sitio
n
F
o
llo
w-Up
Co
n
tr
o
l
OS
C
Error Cause
Error
Processing
Corrective Action
•
An attempt was made to change the current
value data of an axis in motion.
•
An attempt was made to change the current
value data of an axis that had not been
started up.
300
!
!
!
!
!
!
!
!
!
!
!
•
An attempt was made to change the current
value data of an axis whose status was
"servo OFF".
The current
value data is
not changed.
•
Use the following states of the following
devices as interlocks to ensure that the
present value of an axis in motion cannot
be changed.
(1) OFF state of the start accept flag (M2001
to M2004/M2001 to M2008) for the
relevant axis.
(2) ON state of the servo READY flag
M1615+20n.
301
!
•
An attempt was made to change the speed
of an axis executing a zeroing.
•
The speed of an axis executing zeroing
cannot be changed.
302
!
!
•
An attempt was made to change the speed
of an axis executing circular interpolation.
•
The speed of an axis executing circular
interpolation cannot be changed.
303
!
!
!
!
!
!
•
An attempt was made to change the speed
of an axis after automatic deceleration had
started in positioning.
•
The speed of an axis cannot be changed
after automatic deceleration has started.
304
!
•
An attempt was made to change the speed
of an axis during deceleration initiated by
turning OFF the JOG operation start signal
(M1802+20n, M1803+20n).
The speed is
not changed.
•
Do not attempt a speed change during
deceleration initiated by turning OFF the
JOG operation start signal (M1802+20n,
M1803
+
20n).
305
!
!
!
!
!
!
!
!
•
The speed to be changed to in a speed
change was set outside the range of 0 to the
speed limit value.
The speed is
kept at the
speed limit
value.
•
Set the speed within the range from 0 to
the speed limit value.
309
•
A current value change command outside
the range of 0 to 35999999 (
×
10
-5
degrees)
has been issued for an axis whose control
units are degrees.
The present
value data is
not changed.
•
Make a setting in the range of 0 to
35999999 (
×
10
−
5
degrees).
•
A speed change was attempted during high-
speed oscillation.
310
!
•
A speed change to "0" request was issued
during high-speed oscillation.
The speed is
not changed.
•
Do not perform speed changes during
high-speed oscillation.
311
•
A value outside the range 1 to 500% was
set in the torque limit value change request
(CHGT).
•
Make a change request within the range 1
to 500% .
312
•
A torque limit change request (CHGT) was
made for an axis not started yet.
The torque
limit value is
not changed.
•
Make a change request for a started axis.
Downloaded from