























maxon motor control
EPOS2 P Programmable Positioning Controller
Document ID: rel5876
4-35
EPOS2 P 24/5 Hardware Reference
Edition: May 2016
© 2016 maxon motor. Subject to change without prior notice.
4.8.2
CAN Bus Termination in “CAN-M” Supervisor Control (Master) Network
The CAN bus must be terminated at both ends by a termination resistor of 120
Ω
, typically. Depending
on utilization of the controller, individual CAN bus termination settings must be performed.
Using DIP switch JP1A [1], the controller-internal bus termination resistor can be activated/deactivated.
By default, bus termination is “OFF”, nevertheless, the bus is not terminated.
Figure 4-32
DIP Switch (JP1A) – CAN Bus Termination in CAN-M (left “OFF” right “ON”)
4.8.3
CAN Bus Autobitrate in “CAN-M” Supervisor Control (Master) Network
Using DIP switch JP1A [2], autobitrate can be activated/deactivated. By default, autobitrate is “OFF”.
Figure 4-33
DIP Switch (JP1A) – CAN Bus Autobitrate in CAN-M (left “OFF” right “ON”)
4.8.4
CAN Bus Termination in “CAN-S” Slave Network
The CAN bus must be terminated at both ends by a termination resistor of 120
Ω
, typically. Depending
on utilization of the controller, individual CAN bus termination settings must be performed.
Using DIP switch JP1 [8], the controller-internal bus termination resistor can be activated/deactivated.
By default, bus termination is “OFF”, nevertheless, the bus is not terminated.
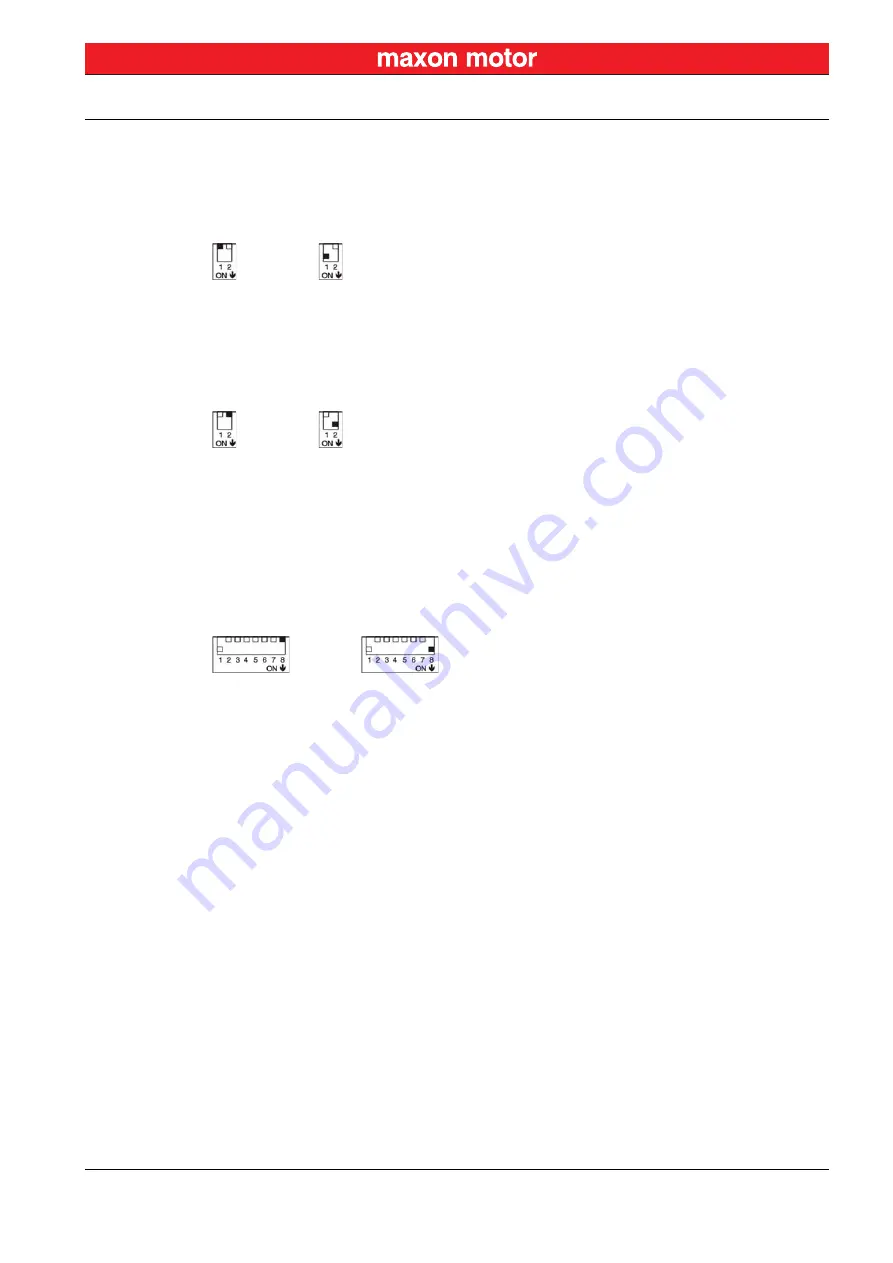
Figure 4-34
DIP Switch (JP1 [8]) – CAN Bus Termination in CAN-S (left “OFF” right “ON”)







































































