Device description
Leuze electronic
LES 36
29
TNT
35/7-2
4
V
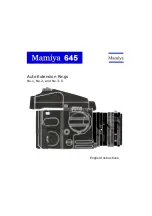
Figure 4.8:
Edge detection with EAWs
Z
+X
-X
O1
EAW01
H
W
LES
Measurement range
Object
Measurement points
H = height difference of two edges
W = object width
Edge Analysis Window
EAW
x axis
z a
x
is
No object detection due to
shadowing in the measure-
ment range
Right edge
(coordinates RX, RZ)
Left edge
(coordinates LX, LZ)
Conveyor path