





























4-32
Chapter 4
For parameter configuration
[bb-43]
~
[bb-62]
Active frequency matching
Code/Name
Range (unit)
Initial value
bb-43
Restart
level
of
Active
frequency matching
Inverter rated
current
×(0.20
~
2.00)
Inverter
rated
current×1.00
bb-44
Restart
constant(speed) of Active
Frequency matching
0.10
~
30.00(s)
0.5
bb-45
Restart constant(Voltage) of
Active Frequency matching
0.10
~
30.00(s)
0.5
bb-46
OC-supress level of Active
frequency matching
Inverter rated
current
×(0.20
~
2.00)
Inverter
rated
current×1.00
bb-47
Restart speed selection of
Active frequency matching
00(Frequency set
when
inverter
output shut off)/
01(Maximum
frequency)/
02(Set frequency)
00
・
The reset interval is set with [bb-46].
・
Starts scanning from the frequency set in [bb-47].
Overcurrent level
Code/Name
Range (unit)
Initial value
bb160
Over current
detection level, 1st-motor
Inverter rated
current × (0.20
~
2.20)
Inverter rated
current×2.20
・
The motor protection level for overcurrent can be set.
・
In the case of a permanent magnet motor is set lower
than the motor demagnetizing level.
Overvoltage warning
Code/Name
Range (unit)
Initial value
bb-61
Power supply over
voltage selection
00(Warning)/
01(Error)
00
bb-62
Power supply over
voltage level setting
(200V Class)
300.0
~
400.0(V)
(400V Class)
600.0
~
800.0(V)
(200V Class)
390.0
(400V Class)
780.0
・
When the input suffers an overvoltage and if the DC
voltage is higher than the value in [bb-62], a warning is
issued in accordance with [bb-61].
[bb-65]
~
[bb260]
Phase loss detection
Code/Name
Range (unit)
Initial
value
bb-65
Input phase loss enable
00(Disable)/01(Enable)
00
bb-66
Output phase loss enable 00(Disable)/01(Enable)
00
bb-67
Output phase loss
detection sensitivity
1
~
100(%)
10
・
Detects the disconnection of the supply RST input line
and UVW output line.
Thermistor error detection
Code/Name
Range (unit)
Initial
value
bb-70
Thermistor error level
0
~
10000(Ω)
3000
Cb-40
Thermistor type selection
00(Disable)/
01(PTC)/02(NTC)
00
・
In [TH] terminal must be attached the kind of thermistor
specified in [CA-60].
・
If [CA-60]=01 or 02, error level must be set in [bb-70].
Overspeed control
Code/Name
Range (unit)
Initial value
bb-80
Overspeed detection level
0.0
~
150.0(%)
135.0
bb-81
Overspeed detection time
0.0
~
5.0(s)
0.5
・
In vector control, when speed arrives to “maximum
speed”×[bb-75], and pass over [bb-76], results in error.
Abnormal deviation in speed control
Code/Name
Range (unit)
Initial value
bb-82
Speed deviation error
mode selection
00(Disable)/
01(Enable)
00
bb-83
Speed deviation error
detection level
0.0
~
100.0(%)
15.0
bb-84
Speed deviation error
detection time
0.0
~
5.0(s)
0.5
・
In vector control, when speed arrives to “maximum
speed”×[bb-83] and pass over [bb-84], results in error.
Abnormal deviation in position control
Code/Name
Range (unit)
Initial value
bb-85
Position deviation error
mode selection
00(Disable)/
01(Enable)
00
bb-86
Position deviation error
detection level
0
~
65535
(×100pulse)
4096
bb-87
Position deviation error
detection level
0.0
~
5.0(s)
0.5
・
During position control, if the position deviation exceeds
the [bb-86], if exceeds the [bb-87] time, will result in an
error.
2nd motor
When Intelligent Input terminal 024[SET] is enabled.
Code/Name
Range (unit)
Initial value
bb201
Carrier frequency, 2nd-motor Same as bb101
bb203
Automatic carrier frequency
reduction enable, 2nd-motor
Same as bb103
bb260
Overcurrent detection level,
2nd-motor
Same as bb160
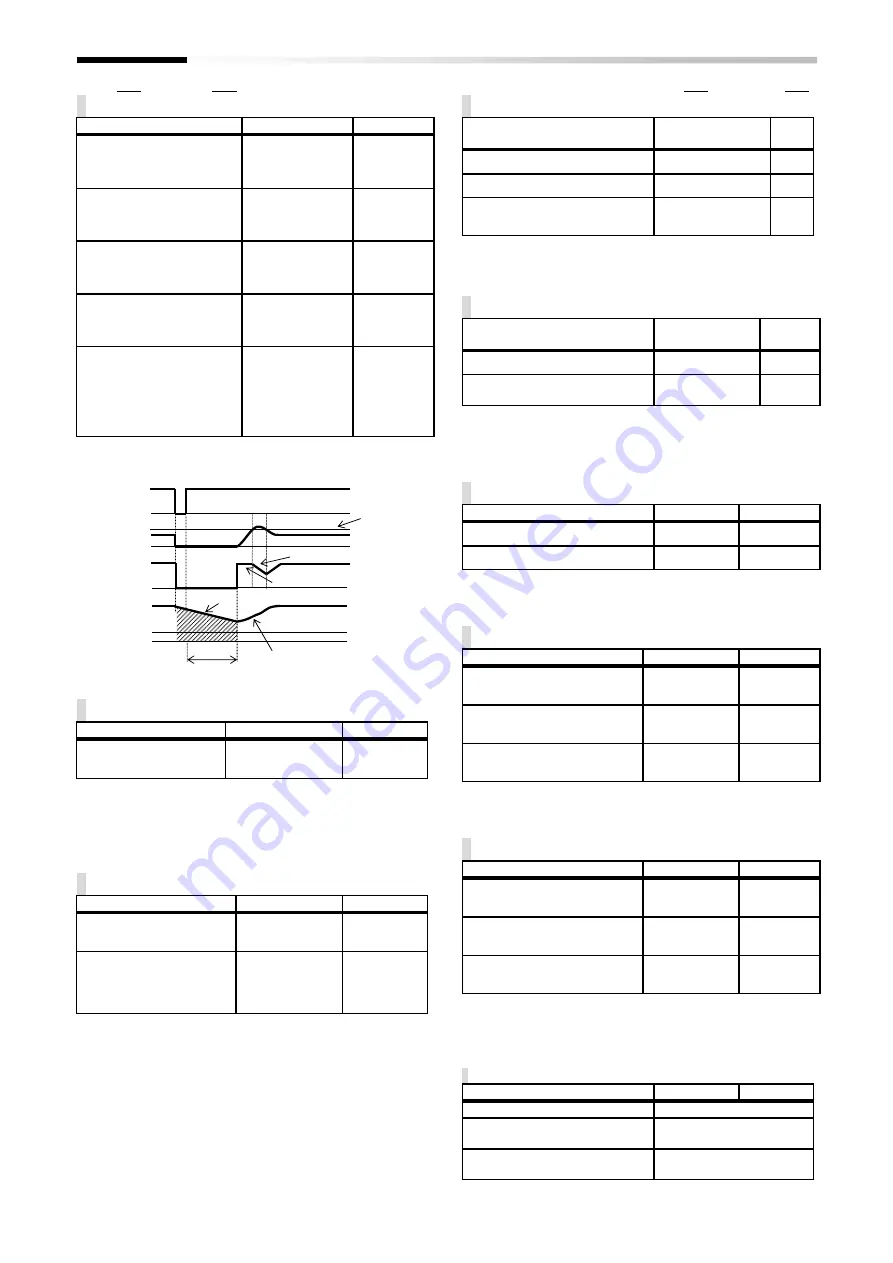
Retry waiting time
Free-run
Primary
cut off
Inverter output
frequency
Motor speed
Lower limit
setting
[bb-59]
Start with matching frequency
Output
current
Active frequency
current level
[bb-43]
Frequency selected in [bb-47]
Deceleration according to[bb-44]
Summary of Contents for P1-00041-H
Page 6: ...0 5 Contents Contents Memo ...
Page 42: ...2 26 Chapter 2 Installation and Wiring Memo ...
Page 129: ...Index Index 3 memo ...
Page 130: ...Index Index 4 memo ...







































































