1.
Make all the parameter changes you need that
will be common for auto and hand mode, like
motor parameters etc.
2.
Set
K-10 Active setup
to
[9] Multi Setup
. This
parameter change is needed to be able to
change setup from an external source, like a
digital input.
3.
Set
K-11 Edit Setup
to
[9] Active Setup
. This is
recommended because then the active setup will
always be the setup that is edited. If you prefer,
you can also ignore this and manually control
what setup you want to edit through K-11.
4.
Set
E-03 Terminal 27 Digital Input
to
[23] Setup
select bit 0
. When terminal 27 is OFF, setup 1
(hand) is active, when it is ON, setup 2 (auto) is
active.
5.
Set
F-01 Frequency Setting 1
to
[1] Analog input 53
(Hand mode)
.
6.
Copy setup 1 to setup 2. Set
K-51 Setup Copy
to
[2] Copy to setup 2
. Now setup 1 and 2 are
identical.
7.
If you need to be able to change between hand
and auto mode while the motor is running, you
will have to link the two setups together. Set
K-12
This Setup Linked to
to
[2] setup 2
.
8.
Change to setup 2 by setting input 27 ON (if K-11
is [9]) or by setting K-11 Edit Setup to setup 2.
9.
Set
F-01 Frequency Setting 1
to
[2] Analog input 54
(Auto mode). If you want different settings in
hand and auto mode, like different accel/decel
ramps, speed limits etc. you can now program
them. You just have to make sure you edit the
correct setup. Setup 1 is Hand mode and setup 2
is Auto mode.
Parameters
Function
Setting
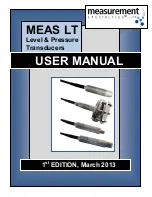
E-01 Terminal 18
Digital Input
[8] Start*
E-03 Terminal 27
Digital Input
[23] Setup
select bit 0
* = Default Value
Notes/comments:
GE 30 mm HOA Cat# (1)
104PSG34B & (3) CR104PXC1
Table 6.12 HOA
6.3 Controls
6.3.1 AF-650 GP Controls
The adjustable frequency drive is capable of controlling
either the speed or the torque on the motor shaft. Setting
H-40 Configuration Mode
determines the type of control.
Speed control
There are two types of speed control:
•
Speed open-loop control which does not require
any feedback from the motor (sensorless).
•
Speed closed-loop PID control requires a speed
feedback to an input. Properly optimized speed
closed-loop control will have higher accuracy
than speed open-loop control.
Selects which input to use as speed PID feedback in
PI-00 Speed PID Feedback Source
.
Torque control
The torque control function is used in applications where
the torque on motor output shaft is controlling the
application as tension control. Torque control can be
Application Setup Examples
AF-650 GP
TM
Design and Installation Guide
DET-767A
6-5
6
6
Summary of Contents for AF-650 GP Series
Page 3: ...Safety AF 650 GPTM Design and Installation Guide DET 767A ...
Page 9: ...Contents AF 650 GPTM Design and Installation Guide DET 767A ...
Page 19: ...Introduction AF 650 GPTM Design and Installation Guide 1 10 DET 767A 1 1 ...
Page 35: ...Installation AF 650 GPTM Design and Installation Guide 2 16 DET 767A 2 2 ...
Page 41: ...Start Up and Functional Tes AF 650 GPTM Design and Installation Guide 3 6 DET 767A 3 3 ...
Page 55: ...About Programming AF 650 GPTM Design and Installation Guide 5 10 DET 767A 5 5 ...
Page 91: ...Application Setup Examples AF 650 GPTM Design and Installation Guide 6 36 DET 767A 6 6 ...
Page 103: ...Status Messages AF 650 GPTM Design and Installation Guide 8 4 DET 767A 8 8 ...
Page 123: ...Warnings and Alarms AF 650 GPTM Design and Installation Guide 10 10 DET 767A 10 0 ...
Page 127: ...Basic Troubleshooting AF 650 GPTM Design and Installation Guide 11 4 DET 767A 11 1 ...
Page 129: ...Terminal and Applicable Wir AF 650 GPTM Design and Installation Guide 12 2 DET 767A 12 2 ...
Page 161: ...Specifications AF 650 GPTM Design and Installation Guide 13 32 DET 767A 13 3 ...