





























7-37
7-4 Functions of the Position Command Mode
7-4-10 Operation for resetting deviation
• While the deviation reset command is “1,” the current command position is rewritten by current feedback position
data.
• After resetting the deviation, in order to enable the positioning operation using the position data sent from the CPU
module, it is necessary to set the start command once to “0.”
The start command monitors rising edge and signal level.
When the deviation reset command has been detected, because the start signal for this module is cleared to “0,” it
is necessary to reset the signal from the CPU module.
7-4-11 Backlash compensation
• Whenever the sign for increment data is reversed, this function adds/subtracts the value of backlash to/from the
increment data.
7-4-12 Feedback pulse multiplication
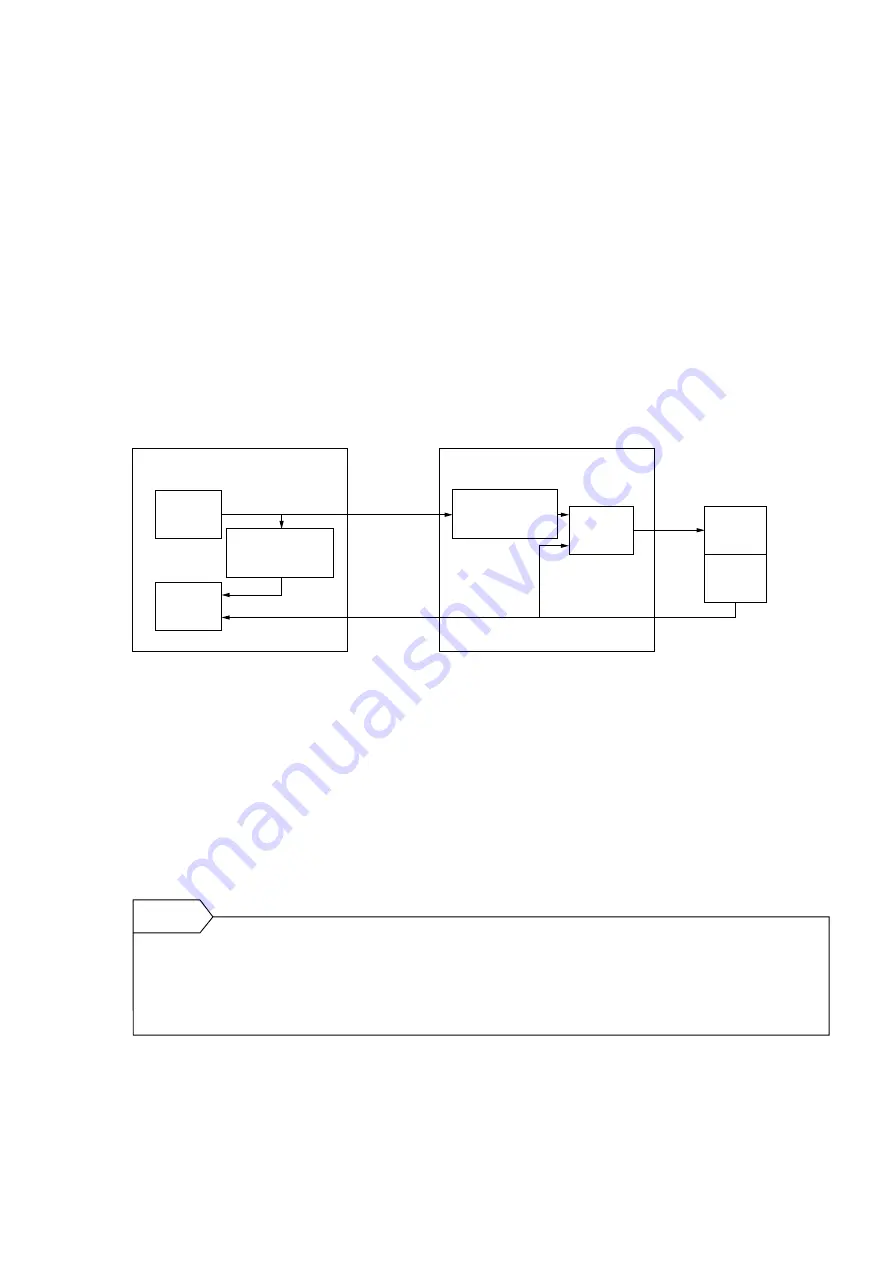
• When feedback pulse is enabled, this function is used for the weighting of the command pulse and feedback pulse.
The figure below shows the relationship between the pulse multiplication function on the module side (NP1F-MP1/
MP2) and that on the servo amplifier side.
This module
Pulse
generator
Position
monitor
Command pulse
multiplication
Command pulse
multiplication
Command
pulse
Deviation
counter
Motor
PG
Feedback
pulse
Servo amplifier
• On the servo amplifier side, command pulse multiplication (x1, x2, x4) is set.
According to the set multiplication, the number of revolutions of motor per single command pulse changes.
• On the module side, because feedback pulses are counted after being multiplied by 4, command pulse
multiplication becomes as follows:
x1: For one feedback pulse (multiplied by 4)
x2: For 2 feedback pulses (multiplied by 2)
x4: For 4 feedback pulses (multiplied by 1)
• On the module side (NP1F-MP1/MP2), the displacement of work is monitored by the difference between the
command pulse count and feedback pulse count, but it is necessary to set the command pulse multiplication so as
to match the multiplication set for the servo amplifier. This multiplication is set in the feedback pulse multiplication
register.
Example:
· Maximum speed: 3000r/min
Encoder pulse count: 2000 pulses/revolution (when multiplied by 1)
For this combination of servo amplifier and motor, when multiplied by 4, the feedback pulse at the maximum
speed becomes 400kHz.
In this case, it is necessary to set the command pulse frequency to 400kHz.
• With this module (NP1F-MP1/MP2), feedback pulse is multiplied by 4 when the phase differential is 90 degrees.
When feedback pulse multiplication is set, because the processing of multiplication is actually made on the
command pulses, current command position data is also multiplied.
Summary of Contents for micrex-sx NP1F-MP1
Page 1: ...FEH214a series USER S MANUAL PULSE TRAIN POSITIONING CONTROL COMBINED MODULE...
Page 28: ...3 10 3 4 Dimensions 3 4 1 NP1F MP1 for 1 axis 3 4 2 NP1F MP2 for 2 axes 90 46 5 75 35 105...
Page 29: ...3 11 3 4 Dimensions 3 4 3 NP2F LEV Signal converter 95 47 2 10 29 8 39 8 85 95 40 36 6...
Page 223: ...Section 8 Troubleshooting Page 8 1 LED Indication 8 1 8 2 Error Indication 8 2...