




























Motor Controller (MC10B8CV1)
MC9S12XHY-Family Reference Manual, Rev. 1.01
Freescale Semiconductor
683
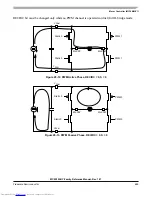
Right aligned (MCAM[1:0] = 10): The output will start inactive (high if RECIRC = 0 and low if
RECIRC = 1) and will turn active after the number of counts specified by the difference of the contents of
period register and the corresponding duty cycle register
.
Center aligned (MCAM[1:0] = 11): Even periods will be output left aligned, odd periods will be output
right aligned. PWM operation starts with the even period after the channel has been enabled. PWM
operation in center aligned mode might start with the odd period if the channel has not been disabled before
changing the alignment mode to center aligned.
0
15
PWM Output
0
1 Period
100 Counts
Motor Controller
Timer Counter
Motor Controller
Timer Counter
Clock
0
1 Period
100 Counts
15
99
99
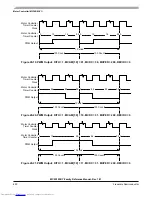
DITH = 0, MCAM[1:0] = 01, MCDCx = 15, MCPER = 100, RECIRC = 0
0
85
PWM Output
0
1 Period
100 Counts
Motor Controller
Timer Counter
Motor Controller
Timer Counter
Clock
0
1 Period
100 Counts
85
99
99
DITH = 0, MCAM[1:0] = 10, MCDCx = 15, MCPER = 100, RECIRC = 0
0
85
PWM Output
0
1 Period
100 Counts
Motor Controller
Timer Counter
Motor Controller
Timer Counter
Clock
0
1 Period
100 Counts
15
99
99
DITH = 0, MCAM[1:0] = 11, MCDCx = 15, MCPER = 100, RECIRC = 0
electronic components distributor







































































