





























63
9. Ethernet/IP
Dual port ethernet option board installation manual
MN032004EN October 2017 www.eaton.com
9.3.1.1 ODVA Output instances
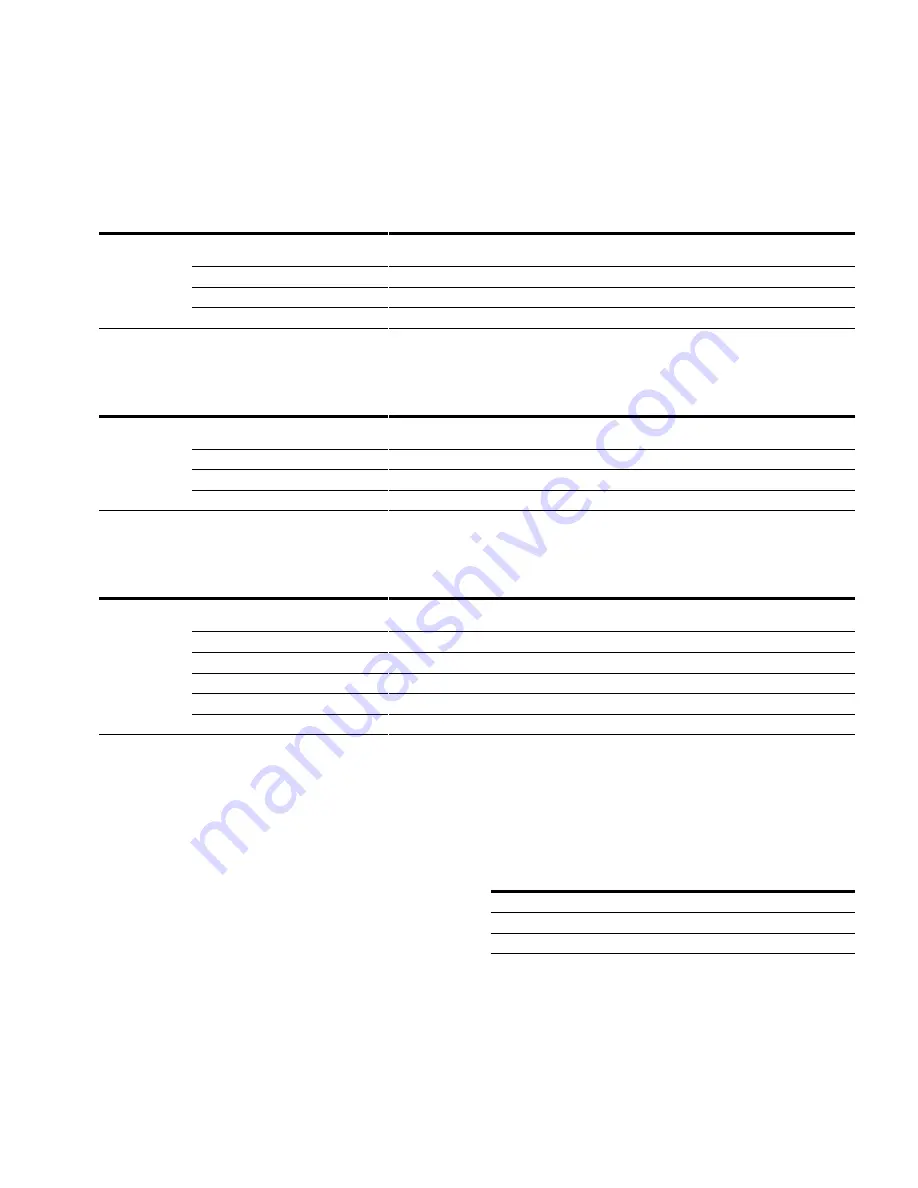
9.3.1.1.1. Assembly instance 20 – basic speed control output
Table 136.
Instance
Octet
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
20 (length 4)
0
Fault
Reset
Run
Fwd
1
2
Speed Reference (Low Octet)
3
Speed Reference (High Octet)
9.3.1.1.2. Assembly instance 21 – extended speed control output
Table 137.
Instance
Octet
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
21 (length 4)
0
NetRef
NetCtrl
Fault
Reset
Run
Rev
Run
Fwd
1
2
Speed Reference (Low Octet)
3
Speed Reference (High Octet)
9.3.1.1.3. Assembly instance 23 – extended speed and torque control output
Table 138.
Instance
Octet
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
23 (length 6)
0
NetRef
NetCtrl
Fault
Reset
Run
Rev
Run
Fwd
1
2
Speed Reference (Low Octet)
3
Speed Reference (High Octet)
4
Torque Reference (Low Octet)
5
Torque Reference (High Octet)
9.3.1.1.4. Assembly instance 25 – extended process control output
The extended process control assembly can be used to
send process reference value directly to the application.
The Process Reference value destination can be selected
with the Drive Mode byte according to the table below.
This should be configured in the application as the receiving
input. To the other direction (input assembly instance 75),
the ProcessDataOut1 is always mapped to the Process
Actual. Note that the process reference value is sent to the
drive only when NetProc bit is set.
The Eaton drives do not support the actual “Process
Control”-mode. Therefore the Drive Mode cannot be set
to the Process Control by using the AC/DC Drive Object
attribute, and the Drive Mode parameter in this assembly
is only used to select the process reference. With these
mappings, the Process Reference and Process Actual can
be used with an application that supports the PID control.
Table 139. Drive mode selection in process control
Drive Mode
Process reference mapping
0
ProcessDataIn1
4
ProcessDataIn2
Other
Not valid