





























Configurable Safety System SAFEMASTER PRO
133
0265525 / 16.05.19 en / 101A
Threshold number:
It allows you to enter the number of thresholds for the maximum value of speed. Changing this value will increase/
decrease the number of thresholds that can be entered from a minimum of 1 to a maximum of 8 with UG
6911.10 (FW
≥
4.0 und UG 6917 FW
≥
2.0) and 4 with UG 6911.10 (FW < 4.0) or UG 6911.12/080 or UG 6917
(FW < 2.0). In the case of thresholds greater than 1, the input pins for the selection of the specific threshold will
appear in the lower part of the function block.
Pitch:
If the Axis Type chosen was linear, this field allows you to enter the sensor pitch to obtain a conversion between
sensor revolutions and distance travelled.
Proximity choice:
It allows you to choose the type of proximity sensor from PNP, NPN, Normally Open (NA) and Normally Closed
(NC), with 3 or 4 wires.
(In order to ensure a Performance Level = PLe use a proximity switch type PNP, NO)
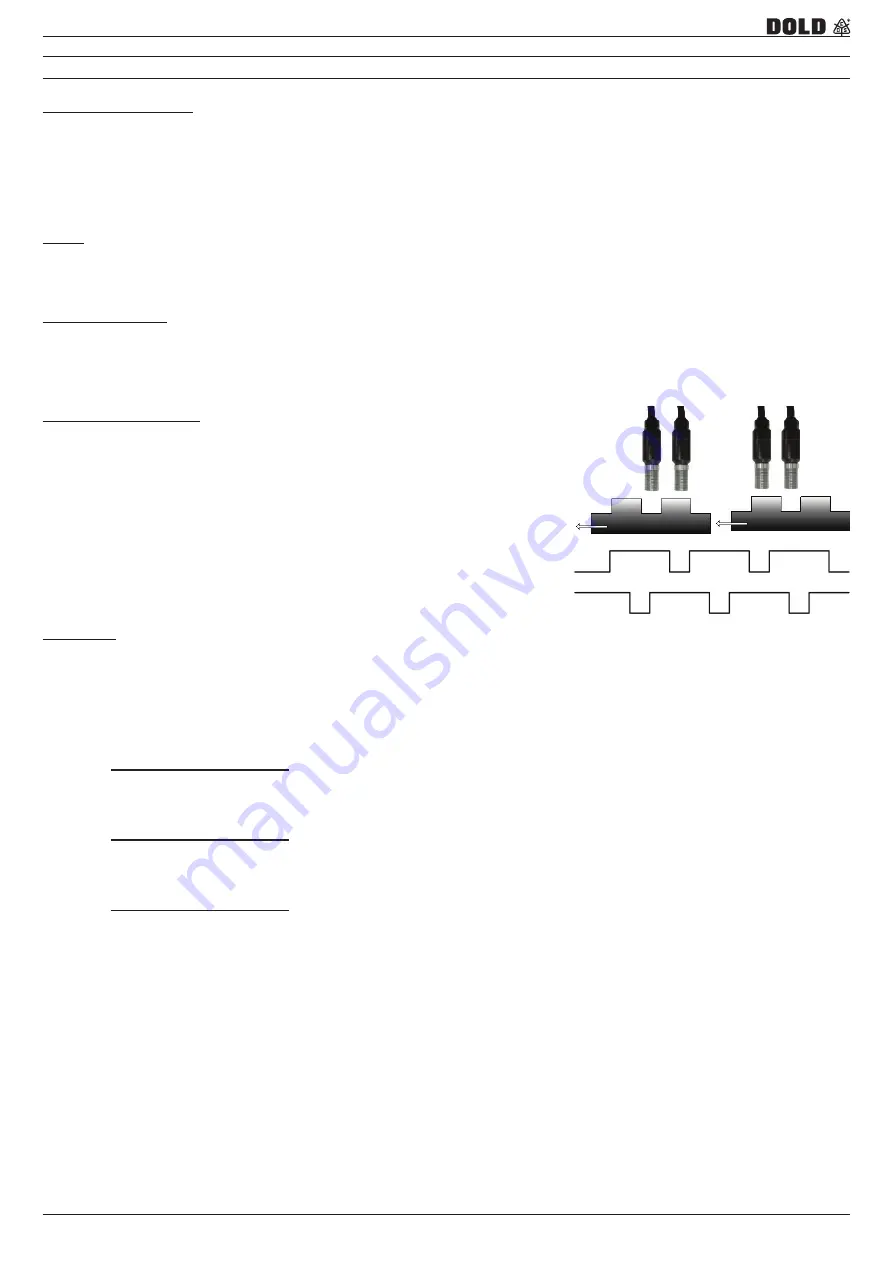
Proximity Interleaved:
When an axis of the UG 6917 module is configured for a
measurement with two proximity switches, these can be
configured in interleaved mode. Under the conditions listed
below the system reaches a Performance Level = PLe
• Proximity switches must be fitted such that the
recorded signals overlap.
• Proximity switches must be fitted such that at least
one is always activated
Frequenz:
It shows the maximum calculated frequency values fM and fm (decreased by the hysteresis set). If the displayed
value is GREEN, the calculation of frequency gave a positive result.
If the displayed value is RED, it is necessary to change the parameters given in the following formulas.
1. Rotary axis, rotary sensor. The frequency obtained is:
f[Hz] =
rpm [rev / min]
x Resolution [pulses / rev]
60
2. Linear axis, rotary sensor. The frequency obtained is:
f[Hz] = speed [m / min] x 1000 x Resolution [pulses / rev]
60 x pitch [mm / rev]
3. Linear axis, linear sensor. The frequency obtained is:
f[Hz] = speed [mm /s ] x 1000
Resolution [
µ
m / pulse]
4. Hysteresis. To be changed only if: fM = GREEN; fm = RED
f
= Frequency
Rpm = Rotational
speed
Resolution = Measurement
Speed = Linear speed Pitch = Sensor pitch
Parameters







































































