





























DESIGNER’S HANDBOOK 4189350049C EN
Page 141 of 206
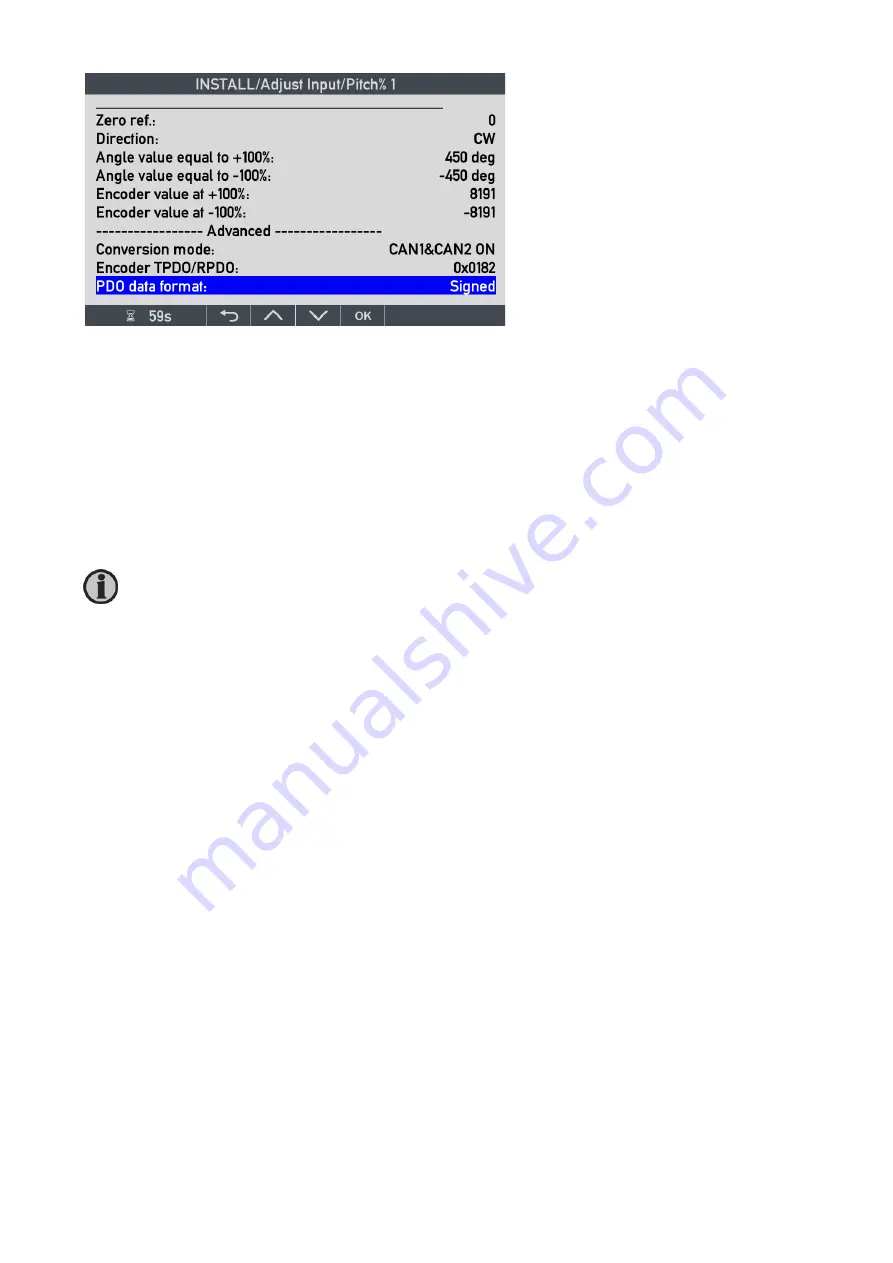
Zero ref.:
it is recommended to calibrate the pitch angle transmitter (encoder) if possible. Alternatively, the zero
reference can be used to offset the angle transmitter input.
Direction:
Works as previously described, it shifts the direction (sign) of the pitch values.
The scaling is set up so that the angle transmitter (encoder) input +/-8191 (equal to +/- 45
o
rotation angle for a 16
bit transmitter) is scaled to +/-45.0
o
. Please note, that the data resolution for pitch angle is x0.1, and that it is
unfortunately not presented like that in the menu; 450 means 450x0.1=45.0 degrees.
The PDO converter will also /- 100.0 % pitch-scaled based on the same inputs.
11.7.4
PDO converter for RPM
The RPM PDO converter follows the same principles as already described. This converter type is also able to
calculate actual RPM and %RPM, but in addition it can also calculate: %Thrust = (%RPM)
2
and %Power =
(%RPM)
3
if the virtual indicator needs to be able to present those data types. The selected VS profile will then
contain parameters to configure the PDO converter to make this calculation. (This is similar to what is described for
the AX1 RPM input adjust a little later in this document)
RPM as well as most data types in the internal object index table are defined with 0.1 resolution (see the XDi-
net/CANopen reference manual for details).
The following example is taken from “DEIF standard azimuth library” where the virtual indicator VI003 is selected,
and the setup profile VS02 for CANopen TPDO is selected.
Very often, only % pitch is presented in the virtual indicator, and the absolute pitch angle in degree is
not used. It is however still the pitch type PDO converter that is used, and therefore the “Angle value
equal to +100 %” (or …
-100 %) is the same as the % values. In such cases, they are often set up to +/-
1000 equal to +/- 100.0.