





























DESIGNER’S HANDBOOK 4189350049C EN
Page 140 of 206
If there are more than one CAN based angle encoder on the same CAN bus, the TPDO COB-ID can easily be
changed via the menu above. If for example a DEIF RTC 600 CAN angle transmitter is programmed by wire to use
NodeID 2 instead of the default NodeID 1, you must change the Encoder TPDO/RPDO hex value to 0x0182 and
XDi will now receive angle data from the 2
nd
angle encoder (transmitter) instead.
11.7.2
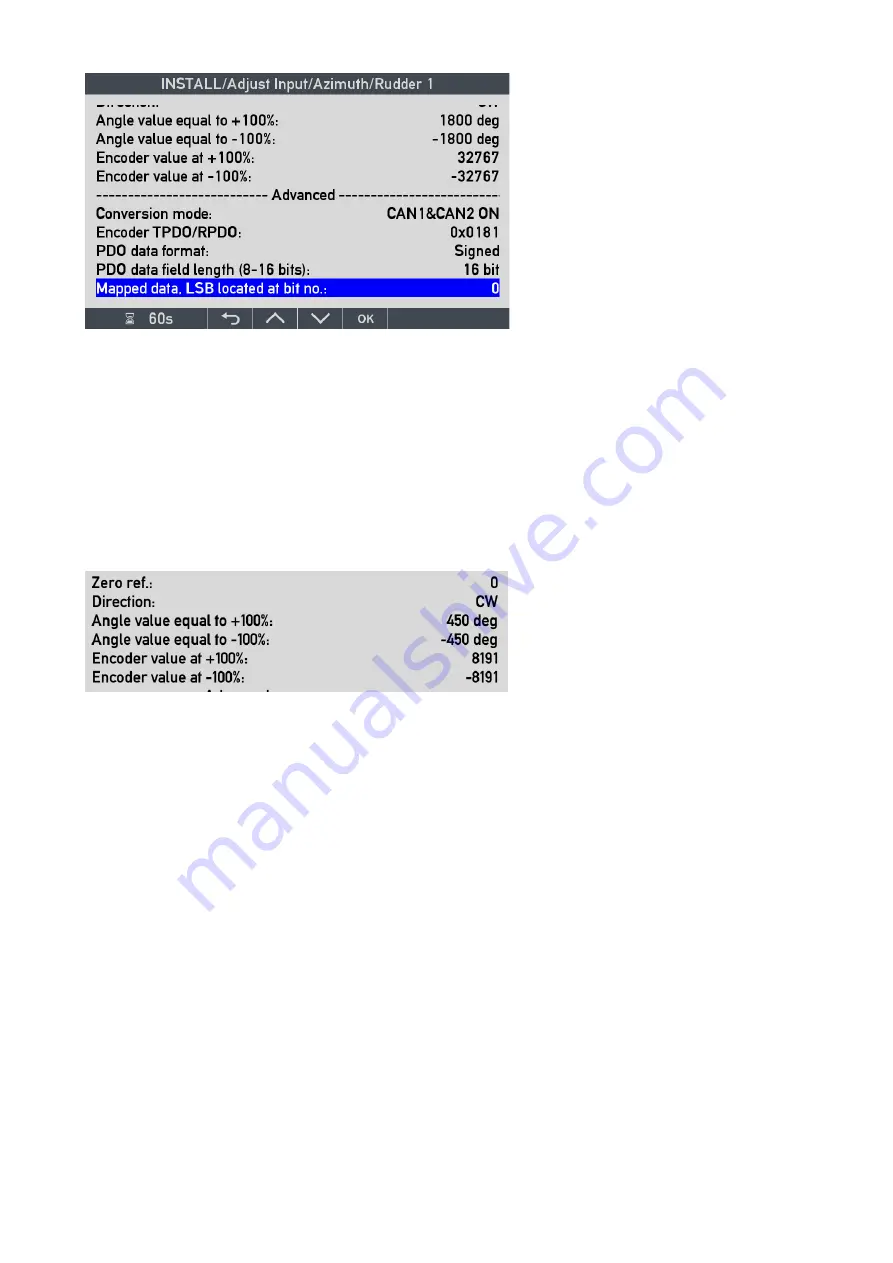
CANopen Rudder transmitter (for example DEIF RTC 600)
If the rudder transmitter was providing input for a +/-45.0 degree rudder angle indicator, the default settings would
be:
Angle values equal to +100 %: 450 (that is 45.0° with the standard resolution for a rudder that is x0.1° ).
Angle values equal to -100 %: - 450 (again x0.1° resolution).
The encoder (or CAN rudder transmitter) values must be scaled accordingly, in this case:
Encoder value at +100 %: 8191 (This equals 45.0
o
shaft angle on a 16 bit encoder
– for example RTC 600)
Encoder value at -100 %: -8191 (equals
– 45.0
o
).
If the mechanical rudder system needs calibration, this can be performed using the following procedure:
1.
Set Zero: position rudder at 0
o
and either zero set the encoder acting as source or make zero set via the menu
(see Zero reference above).
2.
Set rudder to 45
o
starboard and set the new encoder value (if you are not able to move rudder to 45 deg, just
adjust the figures manually. You may also adjust the
“Angle value equal to +/-100 %” to for e/- 40
o
if
the rudder can be physically positioned at this angle, and adjust the encoder values by selecting actual value.
3.
Set rudder to 45
o
portside, and adjust the encoder value at -100 % accordingly.
11.7.3
PDO converter for pitch %
The pitch sensor is also in this example a 16 bit encoder with a CANopen interface. As for the azimuth and rudder
described before, this data source is also a PDO converter. The function is similar to the PDO converter described
for the rudder above:
Angle value equal to + or
–
100 % and
related encoder values for + or
–
100 %
are predefined as +/-1800 (+/-180° with
0.1° resolution). In azimuth mode, this
should not be changed.
If this was a rudder angle input, these
menu entries are used to scale the angle
transmitter input to an actual rudder
angle, and if needed also a %Rudder
value.







































































